Re: Cant get map to display using Orbbec Astra Pro
Posted by bxtcoop on
URL: http://official-rtab-map-forum.206.s1.nabble.com/Cant-get-map-to-display-using-Orbbec-Astra-Pro-tp4984p5014.html
Thanks for getting back to me. I know the Astra Pro doesnt seem to be as popular as the base Astra. I havent found much about configuring it for ROS. I'll try to answer your questions in order and as best I can.
- The output of rosrun tf view_frames is (I'm new to ROS, but I think this is the tree you meant?):
*********************************************************
---
transforms:
-
header:
seq: 0
stamp:
secs: 1537372879
nsecs: 981676619
frame_id: "/camera_link"
child_frame_id: "/camera_depth_frame"
transform:
translation:
x: 0.0
y: -0.02
z: 0.0
rotation:
x: 0.0
y: 0.0
z: 0.0
w: 1.0
---
transforms:
-
header:
seq: 0
stamp:
secs: 1537372879
nsecs: 983863408
frame_id: "/camera_link"
child_frame_id: "/camera_rgb_frame"
transform:
translation:
x: 0.0
y: -0.045
z: 0.0
rotation:
x: 0.0
y: 0.0
z: 0.0
w: 1.0
---
transforms:
-
header:
seq: 0
stamp:
secs: 1537372879
nsecs: 986024877
frame_id: "/camera_rgb_frame"
child_frame_id: "/camera_rgb_optical_frame"
transform:
translation:
x: 0.0
y: 0.0
z: 0.0
rotation:
x: -0.5
y: 0.5
z: -0.5
w: 0.5
---
transforms:
-
header:
seq: 0
stamp:
secs: 1537372879
nsecs: 985986074
frame_id: "/camera_depth_frame"
child_frame_id: "/camera_depth_optical_frame"
transform:
translation:
x: 0.0
y: 0.0
z: 0.0
rotation:
x: -0.5
y: 0.5
z: -0.5
w: 0.5
***************************************************************
And here is the list of published topics:
***************************************************************
/camera/camera_nodelet_manager/bond
/camera/depth/camera_info
/camera/depth/image
/camera/depth/image/compressed
/camera/depth/image/compressed/parameter_descriptions
/camera/depth/image/compressed/parameter_updates
/camera/depth/image/compressedDepth
/camera/depth/image/compressedDepth/parameter_descriptions
/camera/depth/image/compressedDepth/parameter_updates
/camera/depth/image/theora
/camera/depth/image/theora/parameter_descriptions
/camera/depth/image/theora/parameter_updates
/camera/depth/image_raw
/camera/depth/image_raw/compressed
/camera/depth/image_raw/compressed/parameter_descriptions
/camera/depth/image_raw/compressed/parameter_updates
/camera/depth/image_raw/compressedDepth
/camera/depth/image_raw/compressedDepth/parameter_descriptions
/camera/depth/image_raw/compressedDepth/parameter_updates
/camera/depth/image_raw/theora
/camera/depth/image_raw/theora/parameter_descriptions
/camera/depth/image_raw/theora/parameter_updates
/camera/depth/image_rect
/camera/depth/image_rect/compressed
/camera/depth/image_rect/compressed/parameter_descriptions
/camera/depth/image_rect/compressed/parameter_updates
/camera/depth/image_rect/compressedDepth
/camera/depth/image_rect/compressedDepth/parameter_descriptions
/camera/depth/image_rect/compressedDepth/parameter_updates
/camera/depth/image_rect/theora
/camera/depth/image_rect/theora/parameter_descriptions
/camera/depth/image_rect/theora/parameter_updates
/camera/depth/image_rect_raw
/camera/depth/image_rect_raw/compressed
/camera/depth/image_rect_raw/compressed/parameter_descriptions
/camera/depth/image_rect_raw/compressed/parameter_updates
/camera/depth/image_rect_raw/compressedDepth
/camera/depth/image_rect_raw/compressedDepth/parameter_descriptions
/camera/depth/image_rect_raw/compressedDepth/parameter_updates
/camera/depth/image_rect_raw/theora
/camera/depth/image_rect_raw/theora/parameter_descriptions
/camera/depth/image_rect_raw/theora/parameter_updates
/camera/depth/points
/camera/depth_rectify_depth/parameter_descriptions
/camera/depth_rectify_depth/parameter_updates
/camera/depth_registered/camera_info
/camera/depth_registered/image_raw
/camera/depth_registered/image_raw/compressed
/camera/depth_registered/image_raw/compressed/parameter_descriptions
/camera/depth_registered/image_raw/compressed/parameter_updates
/camera/depth_registered/image_raw/compressedDepth
/camera/depth_registered/image_raw/compressedDepth/parameter_descriptions
/camera/depth_registered/image_raw/compressedDepth/parameter_updates
/camera/depth_registered/image_raw/theora
/camera/depth_registered/image_raw/theora/parameter_descriptions
/camera/depth_registered/image_raw/theora/parameter_updates
/camera/depth_registered/points
/camera/depth_registered/sw_registered/camera_info
/camera/depth_registered/sw_registered/image_rect
/camera/depth_registered/sw_registered/image_rect/compressed
/camera/depth_registered/sw_registered/image_rect/compressed/parameter_descriptions
/camera/depth_registered/sw_registered/image_rect/compressed/parameter_updates
/camera/depth_registered/sw_registered/image_rect/compressedDepth
/camera/depth_registered/sw_registered/image_rect/compressedDepth/parameter_descriptions
/camera/depth_registered/sw_registered/image_rect/compressedDepth/parameter_updates
/camera/depth_registered/sw_registered/image_rect/theora
/camera/depth_registered/sw_registered/image_rect/theora/parameter_descriptions
/camera/depth_registered/sw_registered/image_rect/theora/parameter_updates
/camera/depth_registered/sw_registered/image_rect_raw
/camera/depth_registered/sw_registered/image_rect_raw/compressed
/camera/depth_registered/sw_registered/image_rect_raw/compressed/parameter_descriptions
/camera/depth_registered/sw_registered/image_rect_raw/compressed/parameter_updates
/camera/depth_registered/sw_registered/image_rect_raw/compressedDepth
/camera/depth_registered/sw_registered/image_rect_raw/compressedDepth/parameter_descriptions
/camera/depth_registered/sw_registered/image_rect_raw/compressedDepth/parameter_updates
/camera/depth_registered/sw_registered/image_rect_raw/theora
/camera/depth_registered/sw_registered/image_rect_raw/theora/parameter_descriptions
/camera/depth_registered/sw_registered/image_rect_raw/theora/parameter_updates
/camera/driver/parameter_descriptions
/camera/driver/parameter_updates
/camera/ir/camera_info
/camera/ir/image
/camera/ir/image/compressed
/camera/ir/image/compressed/parameter_descriptions
/camera/ir/image/compressed/parameter_updates
/camera/ir/image/compressedDepth
/camera/ir/image/compressedDepth/parameter_descriptions
/camera/ir/image/compressedDepth/parameter_updates
/camera/ir/image/theora
/camera/ir/image/theora/parameter_descriptions
/camera/ir/image/theora/parameter_updates
/camera/projector/camera_info
/image_view/output
/image_view/parameter_descriptions
/image_view/parameter_updates
/rosout
/rosout_agg
/tf
/tf_static
/usb_cam/camera_info
/usb_cam/image_raw
/usb_cam/image_raw/compressed
/usb_cam/image_raw/compressed/parameter_descriptions
/usb_cam/image_raw/compressed/parameter_updates
/usb_cam/image_raw/compressedDepth
/usb_cam/image_raw/compressedDepth/parameter_descriptions
/usb_cam/image_raw/compressedDepth/parameter_updates
/usb_cam/image_raw/theora
/usb_cam/image_raw/theora/parameter_descriptions
/usb_cam/image_raw/theora/parameter_updates
*********************************************************************
When running this command:
roslaunch rtabmap_ros rtabmap.launch rtabmap_args:="--delete_db_on_start" rviz:=true rtabmapviz:=false
It executes, but I get the following warnings:
orm_duration"=0.200000)! Error="canTransform: source_frame usb_cam does not exist.. canTransform returned after 0.200644 timeout was 0.2
[ WARN] [1537391762.757707562]: /rtabmap/rtabmap: Did not receive data since 5 seconds! Make sure the input topics are published ("$ rostopic hz my_topic") and the timestamps in their header are set. If topics are coming from different computers, make sure the clocks of the computers are synchronized ("ntpdate"). If topics are not published at the same rate, you could increase "queue_size" parameter (current=10).
/rtabmap/rtabmap subscribed to (approx sync):
/rtabmap/odom,
/usb_cam/image_raw,
/camera/depth_registered/image_raw,
/usb_cam/camera_info,
/rtabmap/odom_info
Finally, in RVIZ itself, under the PointCloud2 heading, there is an error under transform:
"
Transform [sender=unknown_publisher]
For frame [usb_cam]: Fixed Frame [map] does not exist"
Under global it says "Fixed Frame Map doesnt exist"
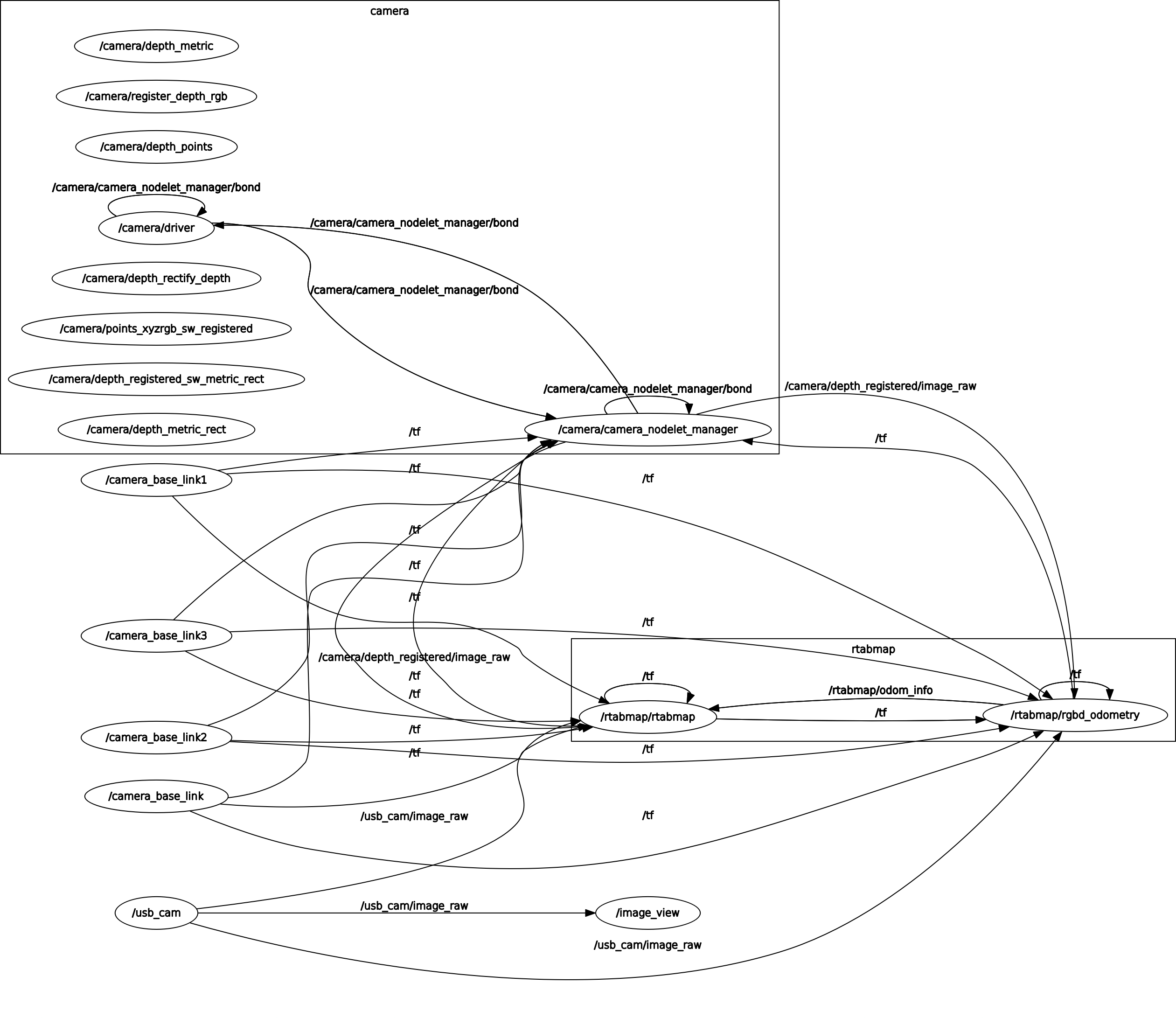
I also mentioned the post you linked to in my original question. I have already changed the name of the
frame id and rebuilt the package as well as doing the camera calibration. I'll attach the frames.pdf and rqt_graph to this replay as well. Maybe that will help. Thanks again for trying to help me pin this down. frames.pdf
URL: http://official-rtab-map-forum.206.s1.nabble.com/Cant-get-map-to-display-using-Orbbec-Astra-Pro-tp4984p5014.html
Thanks for getting back to me. I know the Astra Pro doesnt seem to be as popular as the base Astra. I havent found much about configuring it for ROS. I'll try to answer your questions in order and as best I can.
- The output of rosrun tf view_frames is (I'm new to ROS, but I think this is the tree you meant?):
*********************************************************
---
transforms:
-
header:
seq: 0
stamp:
secs: 1537372879
nsecs: 981676619
frame_id: "/camera_link"
child_frame_id: "/camera_depth_frame"
transform:
translation:
x: 0.0
y: -0.02
z: 0.0
rotation:
x: 0.0
y: 0.0
z: 0.0
w: 1.0
---
transforms:
-
header:
seq: 0
stamp:
secs: 1537372879
nsecs: 983863408
frame_id: "/camera_link"
child_frame_id: "/camera_rgb_frame"
transform:
translation:
x: 0.0
y: -0.045
z: 0.0
rotation:
x: 0.0
y: 0.0
z: 0.0
w: 1.0
---
transforms:
-
header:
seq: 0
stamp:
secs: 1537372879
nsecs: 986024877
frame_id: "/camera_rgb_frame"
child_frame_id: "/camera_rgb_optical_frame"
transform:
translation:
x: 0.0
y: 0.0
z: 0.0
rotation:
x: -0.5
y: 0.5
z: -0.5
w: 0.5
---
transforms:
-
header:
seq: 0
stamp:
secs: 1537372879
nsecs: 985986074
frame_id: "/camera_depth_frame"
child_frame_id: "/camera_depth_optical_frame"
transform:
translation:
x: 0.0
y: 0.0
z: 0.0
rotation:
x: -0.5
y: 0.5
z: -0.5
w: 0.5
***************************************************************
And here is the list of published topics:
***************************************************************
/camera/camera_nodelet_manager/bond
/camera/depth/camera_info
/camera/depth/image
/camera/depth/image/compressed
/camera/depth/image/compressed/parameter_descriptions
/camera/depth/image/compressed/parameter_updates
/camera/depth/image/compressedDepth
/camera/depth/image/compressedDepth/parameter_descriptions
/camera/depth/image/compressedDepth/parameter_updates
/camera/depth/image/theora
/camera/depth/image/theora/parameter_descriptions
/camera/depth/image/theora/parameter_updates
/camera/depth/image_raw
/camera/depth/image_raw/compressed
/camera/depth/image_raw/compressed/parameter_descriptions
/camera/depth/image_raw/compressed/parameter_updates
/camera/depth/image_raw/compressedDepth
/camera/depth/image_raw/compressedDepth/parameter_descriptions
/camera/depth/image_raw/compressedDepth/parameter_updates
/camera/depth/image_raw/theora
/camera/depth/image_raw/theora/parameter_descriptions
/camera/depth/image_raw/theora/parameter_updates
/camera/depth/image_rect
/camera/depth/image_rect/compressed
/camera/depth/image_rect/compressed/parameter_descriptions
/camera/depth/image_rect/compressed/parameter_updates
/camera/depth/image_rect/compressedDepth
/camera/depth/image_rect/compressedDepth/parameter_descriptions
/camera/depth/image_rect/compressedDepth/parameter_updates
/camera/depth/image_rect/theora
/camera/depth/image_rect/theora/parameter_descriptions
/camera/depth/image_rect/theora/parameter_updates
/camera/depth/image_rect_raw
/camera/depth/image_rect_raw/compressed
/camera/depth/image_rect_raw/compressed/parameter_descriptions
/camera/depth/image_rect_raw/compressed/parameter_updates
/camera/depth/image_rect_raw/compressedDepth
/camera/depth/image_rect_raw/compressedDepth/parameter_descriptions
/camera/depth/image_rect_raw/compressedDepth/parameter_updates
/camera/depth/image_rect_raw/theora
/camera/depth/image_rect_raw/theora/parameter_descriptions
/camera/depth/image_rect_raw/theora/parameter_updates
/camera/depth/points
/camera/depth_rectify_depth/parameter_descriptions
/camera/depth_rectify_depth/parameter_updates
/camera/depth_registered/camera_info
/camera/depth_registered/image_raw
/camera/depth_registered/image_raw/compressed
/camera/depth_registered/image_raw/compressed/parameter_descriptions
/camera/depth_registered/image_raw/compressed/parameter_updates
/camera/depth_registered/image_raw/compressedDepth
/camera/depth_registered/image_raw/compressedDepth/parameter_descriptions
/camera/depth_registered/image_raw/compressedDepth/parameter_updates
/camera/depth_registered/image_raw/theora
/camera/depth_registered/image_raw/theora/parameter_descriptions
/camera/depth_registered/image_raw/theora/parameter_updates
/camera/depth_registered/points
/camera/depth_registered/sw_registered/camera_info
/camera/depth_registered/sw_registered/image_rect
/camera/depth_registered/sw_registered/image_rect/compressed
/camera/depth_registered/sw_registered/image_rect/compressed/parameter_descriptions
/camera/depth_registered/sw_registered/image_rect/compressed/parameter_updates
/camera/depth_registered/sw_registered/image_rect/compressedDepth
/camera/depth_registered/sw_registered/image_rect/compressedDepth/parameter_descriptions
/camera/depth_registered/sw_registered/image_rect/compressedDepth/parameter_updates
/camera/depth_registered/sw_registered/image_rect/theora
/camera/depth_registered/sw_registered/image_rect/theora/parameter_descriptions
/camera/depth_registered/sw_registered/image_rect/theora/parameter_updates
/camera/depth_registered/sw_registered/image_rect_raw
/camera/depth_registered/sw_registered/image_rect_raw/compressed
/camera/depth_registered/sw_registered/image_rect_raw/compressed/parameter_descriptions
/camera/depth_registered/sw_registered/image_rect_raw/compressed/parameter_updates
/camera/depth_registered/sw_registered/image_rect_raw/compressedDepth
/camera/depth_registered/sw_registered/image_rect_raw/compressedDepth/parameter_descriptions
/camera/depth_registered/sw_registered/image_rect_raw/compressedDepth/parameter_updates
/camera/depth_registered/sw_registered/image_rect_raw/theora
/camera/depth_registered/sw_registered/image_rect_raw/theora/parameter_descriptions
/camera/depth_registered/sw_registered/image_rect_raw/theora/parameter_updates
/camera/driver/parameter_descriptions
/camera/driver/parameter_updates
/camera/ir/camera_info
/camera/ir/image
/camera/ir/image/compressed
/camera/ir/image/compressed/parameter_descriptions
/camera/ir/image/compressed/parameter_updates
/camera/ir/image/compressedDepth
/camera/ir/image/compressedDepth/parameter_descriptions
/camera/ir/image/compressedDepth/parameter_updates
/camera/ir/image/theora
/camera/ir/image/theora/parameter_descriptions
/camera/ir/image/theora/parameter_updates
/camera/projector/camera_info
/image_view/output
/image_view/parameter_descriptions
/image_view/parameter_updates
/rosout
/rosout_agg
/tf
/tf_static
/usb_cam/camera_info
/usb_cam/image_raw
/usb_cam/image_raw/compressed
/usb_cam/image_raw/compressed/parameter_descriptions
/usb_cam/image_raw/compressed/parameter_updates
/usb_cam/image_raw/compressedDepth
/usb_cam/image_raw/compressedDepth/parameter_descriptions
/usb_cam/image_raw/compressedDepth/parameter_updates
/usb_cam/image_raw/theora
/usb_cam/image_raw/theora/parameter_descriptions
/usb_cam/image_raw/theora/parameter_updates
*********************************************************************
When running this command:
roslaunch rtabmap_ros rtabmap.launch rtabmap_args:="--delete_db_on_start" rviz:=true rtabmapviz:=false
It executes, but I get the following warnings:
orm_duration"=0.200000)! Error="canTransform: source_frame usb_cam does not exist.. canTransform returned after 0.200644 timeout was 0.2
[ WARN] [1537391762.757707562]: /rtabmap/rtabmap: Did not receive data since 5 seconds! Make sure the input topics are published ("$ rostopic hz my_topic") and the timestamps in their header are set. If topics are coming from different computers, make sure the clocks of the computers are synchronized ("ntpdate"). If topics are not published at the same rate, you could increase "queue_size" parameter (current=10).
/rtabmap/rtabmap subscribed to (approx sync):
/rtabmap/odom,
/usb_cam/image_raw,
/camera/depth_registered/image_raw,
/usb_cam/camera_info,
/rtabmap/odom_info
Finally, in RVIZ itself, under the PointCloud2 heading, there is an error under transform:
"
Transform [sender=unknown_publisher]
For frame [usb_cam]: Fixed Frame [map] does not exist"
Under global it says "Fixed Frame Map doesnt exist"
I also mentioned the post you linked to in my original question. I have already changed the name of the
frame id and rebuilt the package as well as doing the camera calibration. I'll attach the frames.pdf and rqt_graph to this replay as well. Maybe that will help. Thanks again for trying to help me pin this down. frames.pdf
| Free forum by Nabble | Edit this page |