Re: RTAB-Map and Unity integration
Posted by matlabbe on
URL: http://official-rtab-map-forum.206.s1.nabble.com/RTAB-Map-and-Unity-integration-tp4925p5031.html
Hi,
It is possible to filter a region in the depth image that we don't want to project to point cloud. The parameter is indeed Grid/DepthRoiRatios, not sure why it didn't work on your side. Here is a small example to keep only top left of the images:
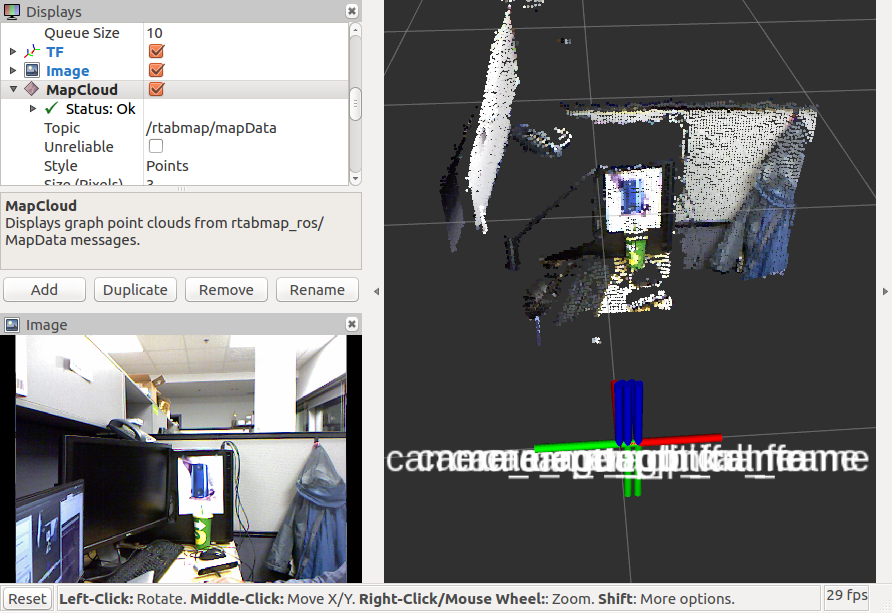
Showing MapCloud (without depth filtering):
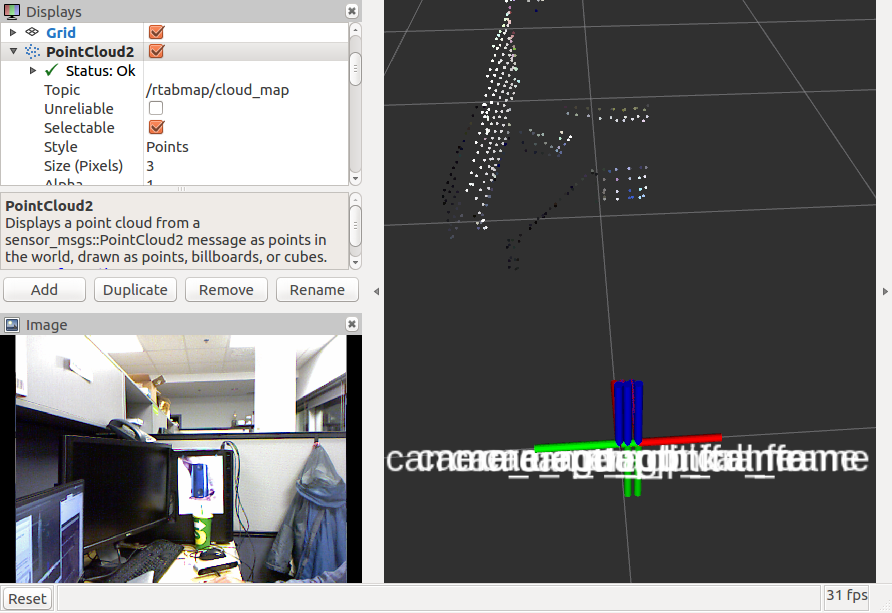
Showing rtabmap/cloud_map topic (with Grid/DepthRoiRatios):
Note that the ratio should be under 0.5 to avoid errors, here is the order of the ratios:
In my reply, the scans and clouds are actually corrected on loop closures, but as the camera transform TF to scan is wrong, the clouds look not corrected but they are (rtabmap doesn't correct the wrong TF between lidar and camera).
cheers,
Mathieu
URL: http://official-rtab-map-forum.206.s1.nabble.com/RTAB-Map-and-Unity-integration-tp4925p5031.html
Hi,
It is possible to filter a region in the depth image that we don't want to project to point cloud. The parameter is indeed Grid/DepthRoiRatios, not sure why it didn't work on your side. Here is a small example to keep only top left of the images:
$ roslaunch rtabmap_ros args:="-d --Grid/DepthRoiRatios \"0 0.4 0 0.4\"" rtabmap.launch rviz:=true rtabmapviz:=false
Showing MapCloud (without depth filtering):
Showing rtabmap/cloud_map topic (with Grid/DepthRoiRatios):
Note that the ratio should be under 0.5 to avoid errors, here is the order of the ratios:
$ rtabmap --params | grep Grid/DepthRoiRatios Param: Grid/DepthRoiRatios = "0.0 0.0 0.0 0.0" [[Grid/FromDepth=true] Region of interest ratios [left, right, top, bottom].]
In my reply, the scans and clouds are actually corrected on loop closures, but as the camera transform TF to scan is wrong, the clouds look not corrected but they are (rtabmap doesn't correct the wrong TF between lidar and camera).
cheers,
Mathieu
| Free forum by Nabble | Edit this page |