Re: Clarification on RGB and Depth image has input from Stereo camera
Posted by FeKl on
URL: http://official-rtab-map-forum.206.s1.nabble.com/Clarification-on-RGB-and-Depth-image-has-input-from-Stereo-camera-tp2469p5099.html
Hi Mathieu,
sorry for asking again about the depth topic. But maybe our above algorithm is not fully correct...
The 3D-Map seems not to be correct. By zooming in or out, there are a lot of black areas in the 3D-Map... it is quite annoying.
In order to find out where the problem could be, I tried the stereo output of the Nerian camera in the following way:
1. output nerian camera: left and right images
2. use stereo_image_proc/disparity to get the disparity in the "normal" type (stereo_msgs/DisparityImage)
3. use rtabmap_ros/disparity_to_depth to get the depth map
To compare this depth map with our depth-algorithm above, I attached two videos of the depth map:
depth_rtabmap.mkv
depth_our.mkv
The first video is about the depth coming from rtabmap_ros/disparity_to_depth; the second video is about our depth-algorithm.
Maybe this could help you to find the problem.
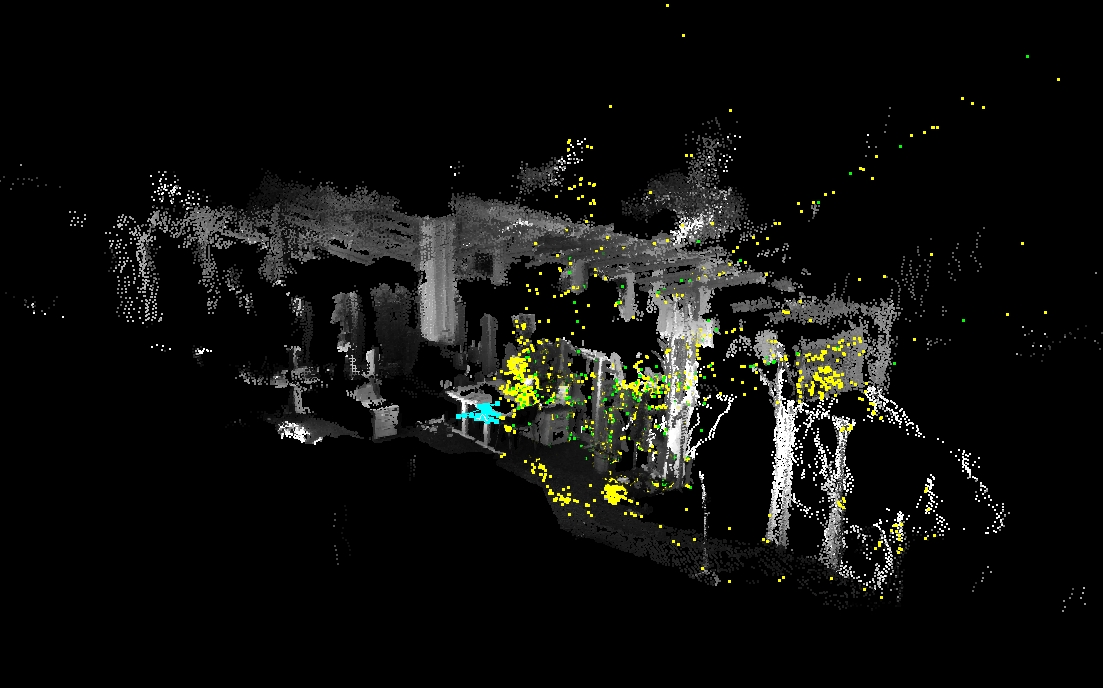
Here, we have an output of the correct 3D-Map (it is an office scene) with the RGBD mapping using the stereo images with rtabmap_ros/disparity_to_depth:
Kind regards,
Felix
URL: http://official-rtab-map-forum.206.s1.nabble.com/Clarification-on-RGB-and-Depth-image-has-input-from-Stereo-camera-tp2469p5099.html
Hi Mathieu,
sorry for asking again about the depth topic. But maybe our above algorithm is not fully correct...
The 3D-Map seems not to be correct. By zooming in or out, there are a lot of black areas in the 3D-Map... it is quite annoying.
In order to find out where the problem could be, I tried the stereo output of the Nerian camera in the following way:
1. output nerian camera: left and right images
2. use stereo_image_proc/disparity to get the disparity in the "normal" type (stereo_msgs/DisparityImage)
3. use rtabmap_ros/disparity_to_depth to get the depth map
To compare this depth map with our depth-algorithm above, I attached two videos of the depth map:
depth_rtabmap.mkv
depth_our.mkv
The first video is about the depth coming from rtabmap_ros/disparity_to_depth; the second video is about our depth-algorithm.
Maybe this could help you to find the problem.
Here, we have an output of the correct 3D-Map (it is an office scene) with the RGBD mapping using the stereo images with rtabmap_ros/disparity_to_depth:
Kind regards,
Felix
| Free forum by Nabble | Edit this page |