Re: Clarification on RGB and Depth image has input from Stereo camera
Posted by FeKl on
URL: http://official-rtab-map-forum.206.s1.nabble.com/Clarification-on-RGB-and-Depth-image-has-input-from-Stereo-camera-tp2469p5107.html
Hi Mathieu,
thanks again for your reply.
I have done a look at the corresponding disparity maps, see
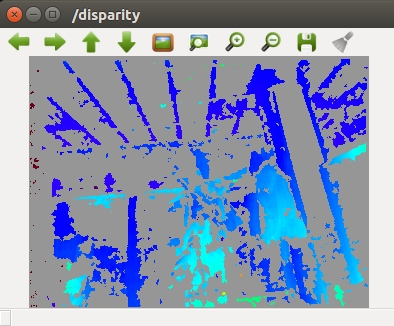
1) The one which comes from the Nerian camera (converted as als stereo_msgs/DisparityImage):
2) The one which we get via stereo_image_proc/disparity from a stereo pair of the Nerian camera (also as stereo_msgs/DisparityImage):
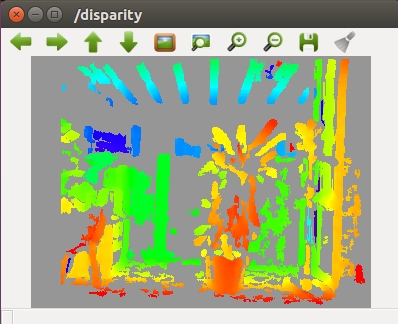
The vizualisation is done with image_view.
Can you see any problems with the first disparity map? Could it be that the disparity map which comes directly from the Nerian camera is too dense?
Kind regards,
Felix
URL: http://official-rtab-map-forum.206.s1.nabble.com/Clarification-on-RGB-and-Depth-image-has-input-from-Stereo-camera-tp2469p5107.html
Hi Mathieu,
thanks again for your reply.
I have done a look at the corresponding disparity maps, see
1) The one which comes from the Nerian camera (converted as als stereo_msgs/DisparityImage):
2) The one which we get via stereo_image_proc/disparity from a stereo pair of the Nerian camera (also as stereo_msgs/DisparityImage):
The vizualisation is done with image_view.
Can you see any problems with the first disparity map? Could it be that the disparity map which comes directly from the Nerian camera is too dense?
Kind regards,
Felix
| Free forum by Nabble | Edit this page |