Error when run rtabmap_ros on Nao robot
Posted by Robin-Wu on
URL: http://official-rtab-map-forum.206.s1.nabble.com/Error-when-run-rtabmap-ros-on-Nao-robot-tp5110.html
I am a newer in Ros and Rtabmap_ros ,and I want to run the Rtabmap_ros with xbox 360 on NAO robot ,so I make a simple launch file but i have some questions:
(1)the 3d map is update but my Robot is not move
(2)the map is not on horizon
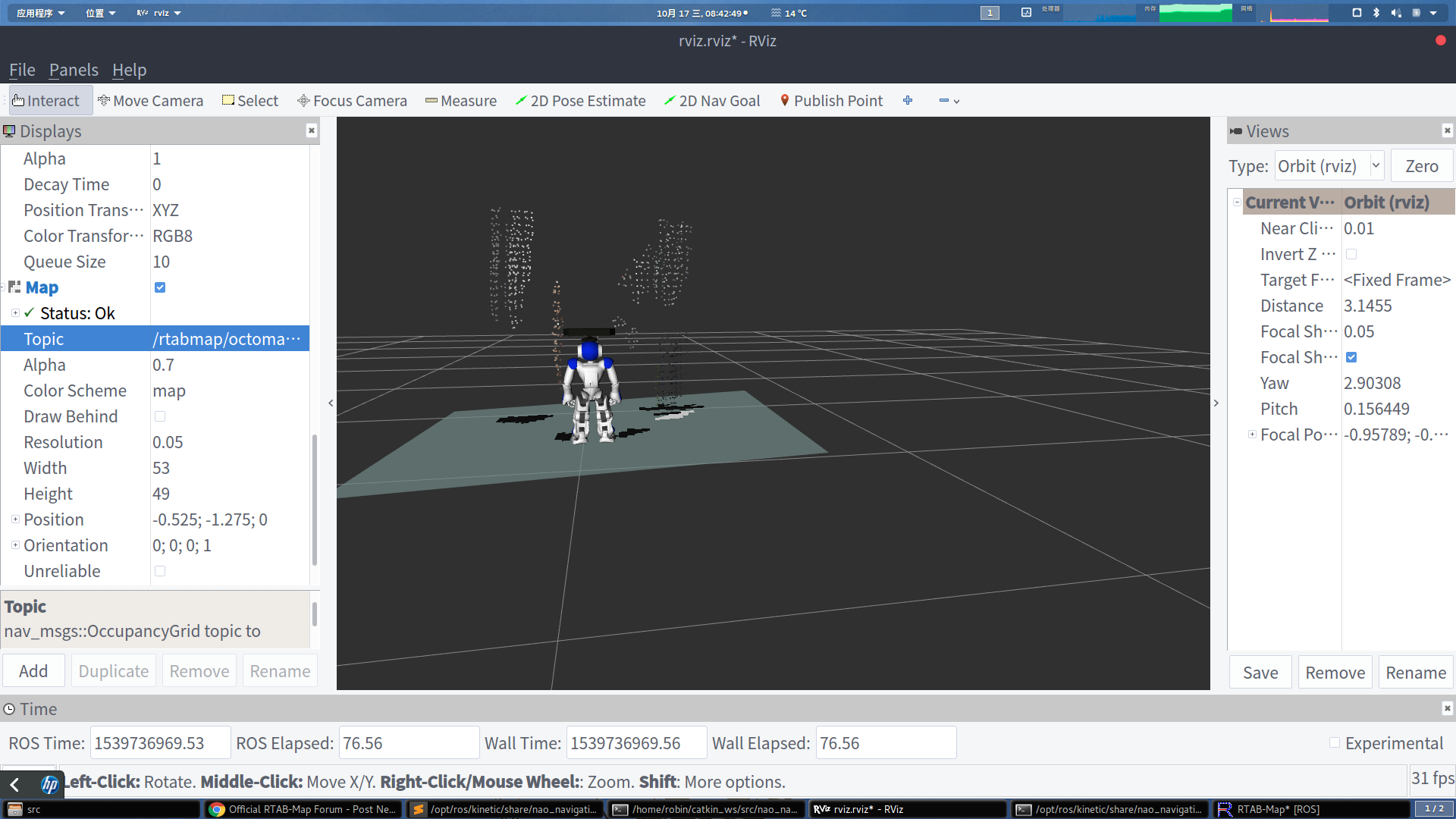
I think is the problem of tf between /base_link and /camera_link ,but I have no idea to solve it
and my simple launch file is :
<launch>
<node pkg="tf" type="static_transform_publisher" name="kinect_to_base_link"
args="$0 0 0.2 0 0 0 /base_link /camera_link 100" >
</node>
<include file="$(find openni_launch)/launch/openni.launch">
<arg name="depth_registration" value="true"/>
</include>
<include file="$(find rtabmap_ros)/launch/rtabmap.launch">
<arg name="rtabmap_args" value="--delete_db_on_start"/>
<arg name="frame_id" value="/base_link"/>
<arg name="rtabmapviz" value="true"/>
</include>
</launch>
URL: http://official-rtab-map-forum.206.s1.nabble.com/Error-when-run-rtabmap-ros-on-Nao-robot-tp5110.html
I am a newer in Ros and Rtabmap_ros ,and I want to run the Rtabmap_ros with xbox 360 on NAO robot ,so I make a simple launch file but i have some questions:
(1)the 3d map is update but my Robot is not move
(2)the map is not on horizon
I think is the problem of tf between /base_link and /camera_link ,but I have no idea to solve it
and my simple launch file is :
<launch>
<node pkg="tf" type="static_transform_publisher" name="kinect_to_base_link"
args="$0 0 0.2 0 0 0 /base_link /camera_link 100" >
</node>
<include file="$(find openni_launch)/launch/openni.launch">
<arg name="depth_registration" value="true"/>
</include>
<include file="$(find rtabmap_ros)/launch/rtabmap.launch">
<arg name="rtabmap_args" value="--delete_db_on_start"/>
<arg name="frame_id" value="/base_link"/>
<arg name="rtabmapviz" value="true"/>
</include>
</launch>
| Free forum by Nabble | Edit this page |