Re: RTAB-Map and Unity integration
Posted by matlabbe on
URL: http://official-rtab-map-forum.206.s1.nabble.com/RTAB-Map-and-Unity-integration-tp4925p5115.html
Hi,
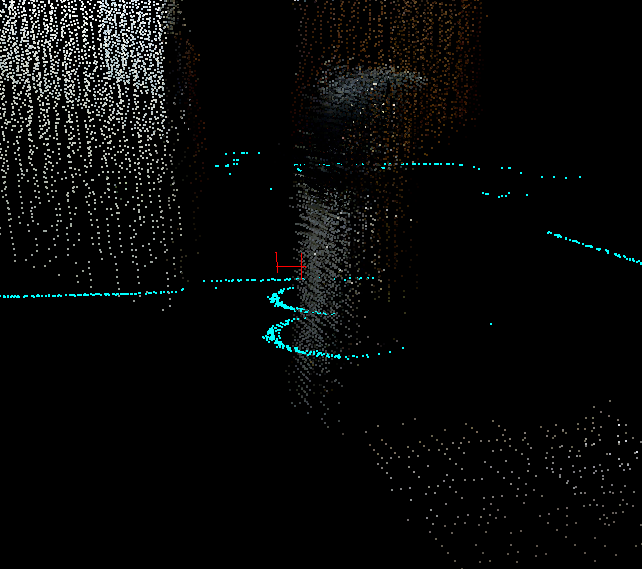
I don't see a problem at 33 sec in the bag, here is the screenshot of the map so far:

Note that because of the camera scale and TF problem, the clouds are already not aligned with the scans, here a close up of the image above around the trash cans:
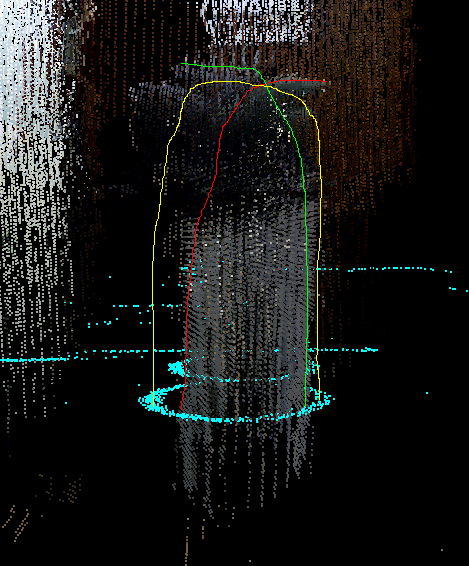
The clouds look more farther than the scans. Imagine now that you are coming back, it will make sure that the trash can's clouds will overlap even if the scans are perfectly aligned, here the example (at ~110 sec, in yellow where the trash can's cloud should be in reality based on the scans),
It can be quite hard indeed to get all sensors correctly aligned and in the same scale. The question is "Is it really a problem that the clouds are not aligned perfectly with the scans?"
For navigation, I don't think so if the error is below 2.5 cm. For accurate 3D reconstruction, it is indeed a problem, so careful calibration and sensor alignment are required.
From the Xtion I have, it has more distortion (over 3 meters) than my kinect 360, not sure if this applies to all Xtion. The Kinect for Xbox One is a TOF sensor, maybe easier to get the scale right. I didn't do myself experiments to evaluate the scale precision of the different sensors, maybe some papers did it. I know however that in the TUM RGBD-D dataset, the scale of the depth image or the calibration can be a little off from the ground truth on some sequences. More related to your experiment with lidar, see the second bullet point of Section 4.4 in this paper "RTAB-Map as an Open-Source Lidar and Visual SLAM Library for Large-Scale and Long-Term Online Operation" about matching the lidar and the stereo/rgb-d camera of the MIT Stata Center dataset:
cheers,
Mathieu
URL: http://official-rtab-map-forum.206.s1.nabble.com/RTAB-Map-and-Unity-integration-tp4925p5115.html
Hi,
I don't see a problem at 33 sec in the bag, here is the screenshot of the map so far:
Note that because of the camera scale and TF problem, the clouds are already not aligned with the scans, here a close up of the image above around the trash cans:
The clouds look more farther than the scans. Imagine now that you are coming back, it will make sure that the trash can's clouds will overlap even if the scans are perfectly aligned, here the example (at ~110 sec, in yellow where the trash can's cloud should be in reality based on the scans),
It can be quite hard indeed to get all sensors correctly aligned and in the same scale. The question is "Is it really a problem that the clouds are not aligned perfectly with the scans?"
For navigation, I don't think so if the error is below 2.5 cm. For accurate 3D reconstruction, it is indeed a problem, so careful calibration and sensor alignment are required.
From the Xtion I have, it has more distortion (over 3 meters) than my kinect 360, not sure if this applies to all Xtion. The Kinect for Xbox One is a TOF sensor, maybe easier to get the scale right. I didn't do myself experiments to evaluate the scale precision of the different sensors, maybe some papers did it. I know however that in the TUM RGBD-D dataset, the scale of the depth image or the calibration can be a little off from the ground truth on some sequences. More related to your experiment with lidar, see the second bullet point of Section 4.4 in this paper "RTAB-Map as an Open-Source Lidar and Visual SLAM Library for Large-Scale and Long-Term Online Operation" about matching the lidar and the stereo/rgb-d camera of the MIT Stata Center dataset:
Note however that we only tested localization performance, not the reconstruction quality (e.g., 3D map created from lidar odometry vs 3D map created from visual odometry vs 3D map created from wheel odometry).
cheers,
Mathieu
| Free forum by Nabble | Edit this page |