Re: Error when run rtabmap_ros on Nao robot
Posted by Robin-Wu on
URL: http://official-rtab-map-forum.206.s1.nabble.com/Error-when-run-rtabmap-ros-on-Nao-robot-tp5110p5119.html
Hi,
Thank you for all your assistance.
This is my launch file:
<launch>
<node pkg="tf" type="static_transform_publisher" name="kinect_to_base_link"
args="$0 0 0.2 0 0 0 /base_link /camera_link 100" >
</node>
<include file="$(find openni_launch)/launch/openni.launch">
<arg name="depth_registration" value="true"/>
</include>
<include file="$(find rtabmap_ros)/launch/rtabmap.launch">
<arg name="rtabmap_args" value="--delete_db_on_start"/>
<arg name="frame_id" value="/base_link"/>
<arg name="rtabmapviz" value="true"/>
<arg name="visual_odometry" value="false"/>
<arg name="odom_topic" value="/odom"/>
</include>
</launch>
from this file ,my odom_topic is /odom,and the graph is better than before,but the map will swaying from side to side and move when my robot is moveing(perhaps is because my robot's odom is sway when moving)
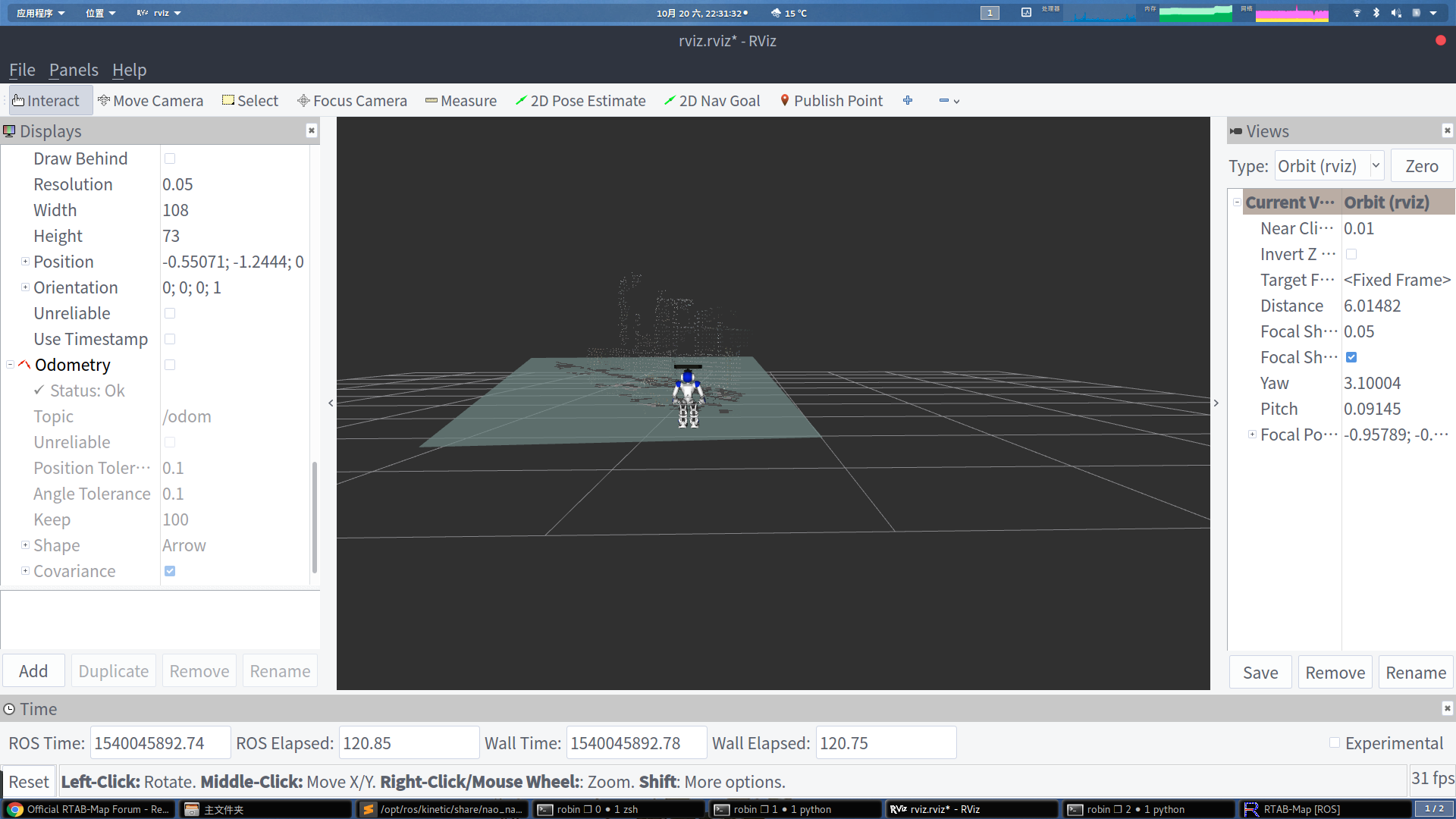
So ,Can you give me some suggestions?
Yours
Sincerely
URL: http://official-rtab-map-forum.206.s1.nabble.com/Error-when-run-rtabmap-ros-on-Nao-robot-tp5110p5119.html
Hi,
Thank you for all your assistance.
This is my launch file:
<launch>
<node pkg="tf" type="static_transform_publisher" name="kinect_to_base_link"
args="$0 0 0.2 0 0 0 /base_link /camera_link 100" >
</node>
<include file="$(find openni_launch)/launch/openni.launch">
<arg name="depth_registration" value="true"/>
</include>
<include file="$(find rtabmap_ros)/launch/rtabmap.launch">
<arg name="rtabmap_args" value="--delete_db_on_start"/>
<arg name="frame_id" value="/base_link"/>
<arg name="rtabmapviz" value="true"/>
<arg name="visual_odometry" value="false"/>
<arg name="odom_topic" value="/odom"/>
</include>
</launch>
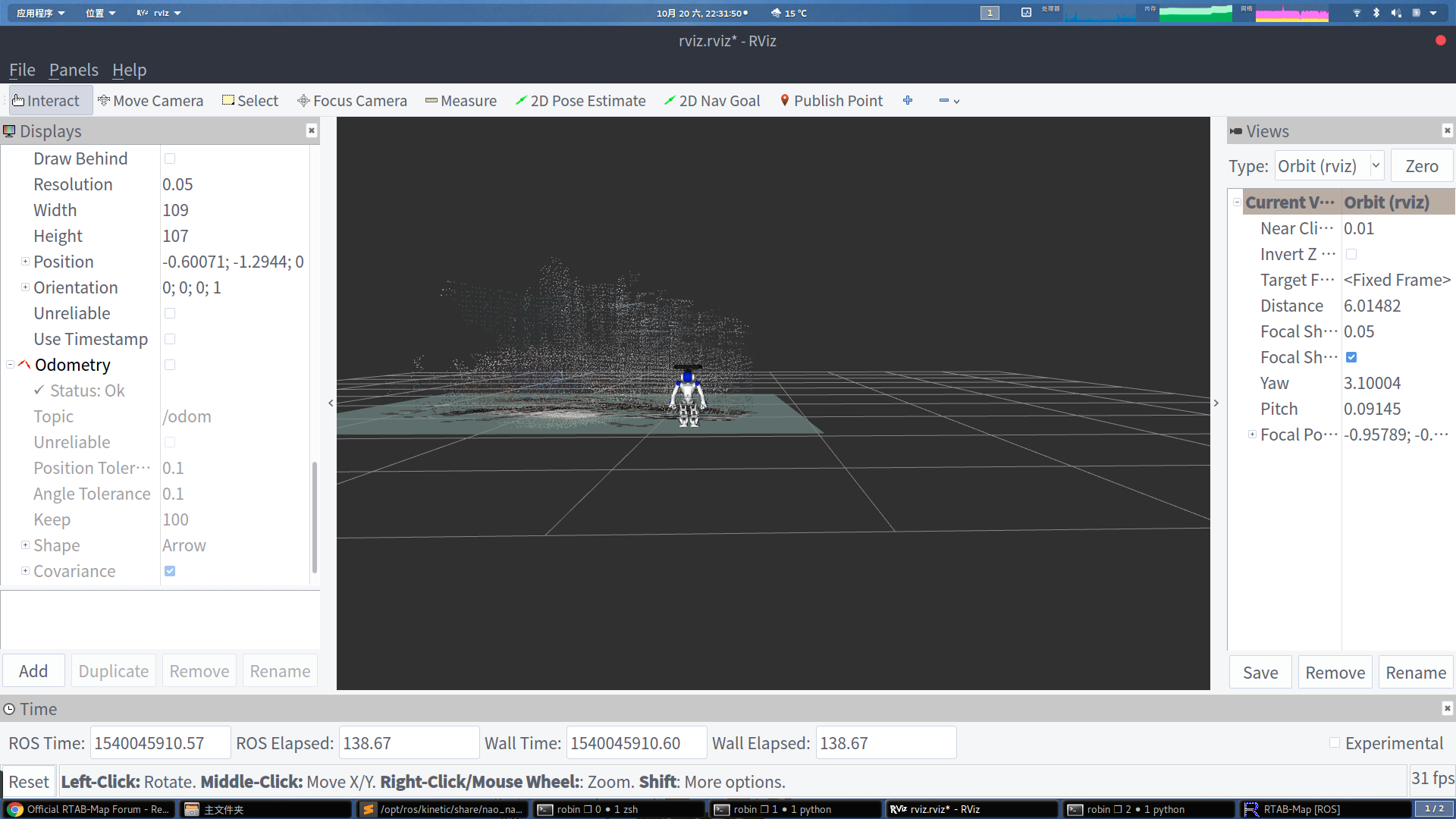
from this file ,my odom_topic is /odom,and the graph is better than before,but the map will swaying from side to side and move when my robot is moveing(perhaps is because my robot's odom is sway when moving)
So ,Can you give me some suggestions?
Yours
Sincerely
| Free forum by Nabble | Edit this page |