Re: How does rtabmap deal with dynamic objects?
Posted by matlabbe on
URL: http://official-rtab-map-forum.206.s1.nabble.com/How-does-rtabmap-deal-with-dynamic-objects-tp4735p5170.html
See Figure 7 of the "RTAB-Map as an Open-Source Lidar and Visual SLAM Library for Large-Scale and Long-Term Online Operation" paper:
Parameters are:
To clear moving people, the sensor should be able to see the background (e.g., a wall behind where the person was). If you see Table 10 in the paper, the computation time is quite high when a loop should be closed.
If you don't need 3D point clouds and if only a 2D map from projected 3D obstacles would be enough, consider using the 2D occupancy grid with tracing instead (grid_map):
cheers,
Mathieu
URL: http://official-rtab-map-forum.206.s1.nabble.com/How-does-rtabmap-deal-with-dynamic-objects-tp4735p5170.html
See Figure 7 of the "RTAB-Map as an Open-Source Lidar and Visual SLAM Library for Large-Scale and Long-Term Online Operation" paper:
Parameters are:
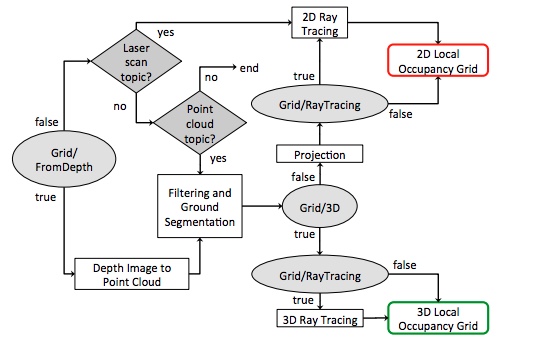
Grid/FromDepth=true Grid/3D=true Grid/RayTracing=true
To clear moving people, the sensor should be able to see the background (e.g., a wall behind where the person was). If you see Table 10 in the paper, the computation time is quite high when a loop should be closed.
If you don't need 3D point clouds and if only a 2D map from projected 3D obstacles would be enough, consider using the 2D occupancy grid with tracing instead (grid_map):
Grid/FromDepth=true Grid/3D=false Grid/RayTracing=true
cheers,
Mathieu
| Free forum by Nabble | Edit this page |