Re: Error when run rtabmap_ros on Nao robot
Posted by Robin-Wu on
URL: http://official-rtab-map-forum.206.s1.nabble.com/Error-when-run-rtabmap-ros-on-Nao-robot-tp5110p5180.html
Hi!,
I have another questions that if I set the visual_odometry false ,the graph in rviz is ok like this
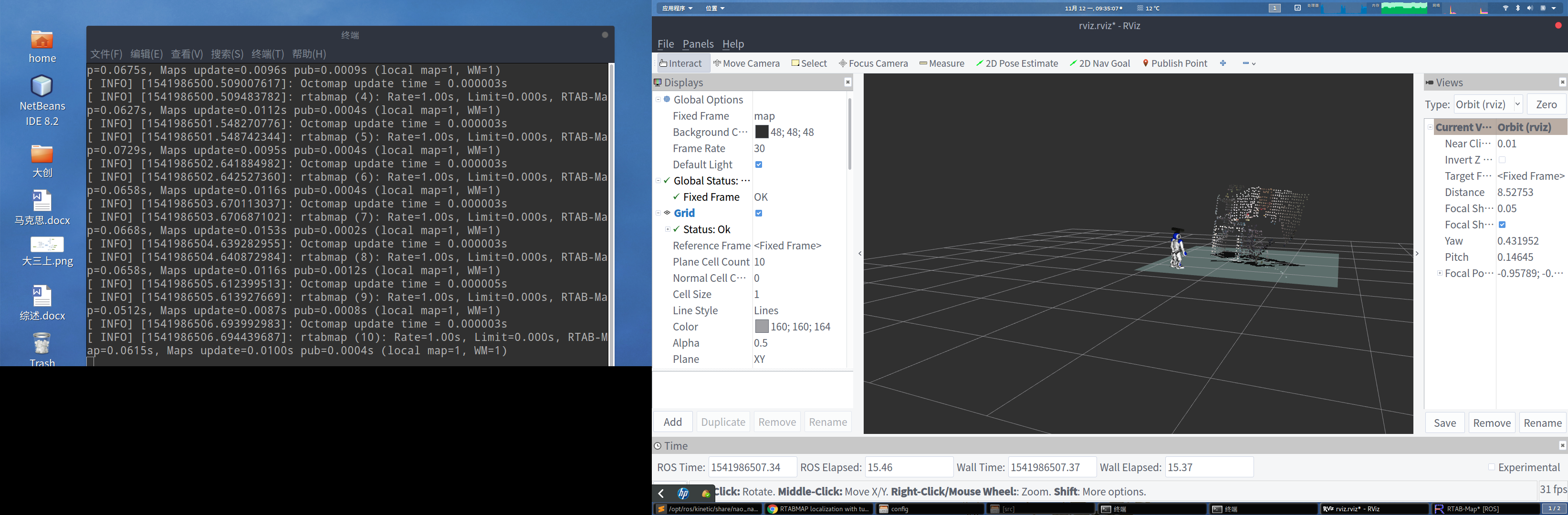
but when i running the costmap ,it shows that Timed out waiting for transform from base_link to rtabmap/grid_m ap to become available before running costmap.
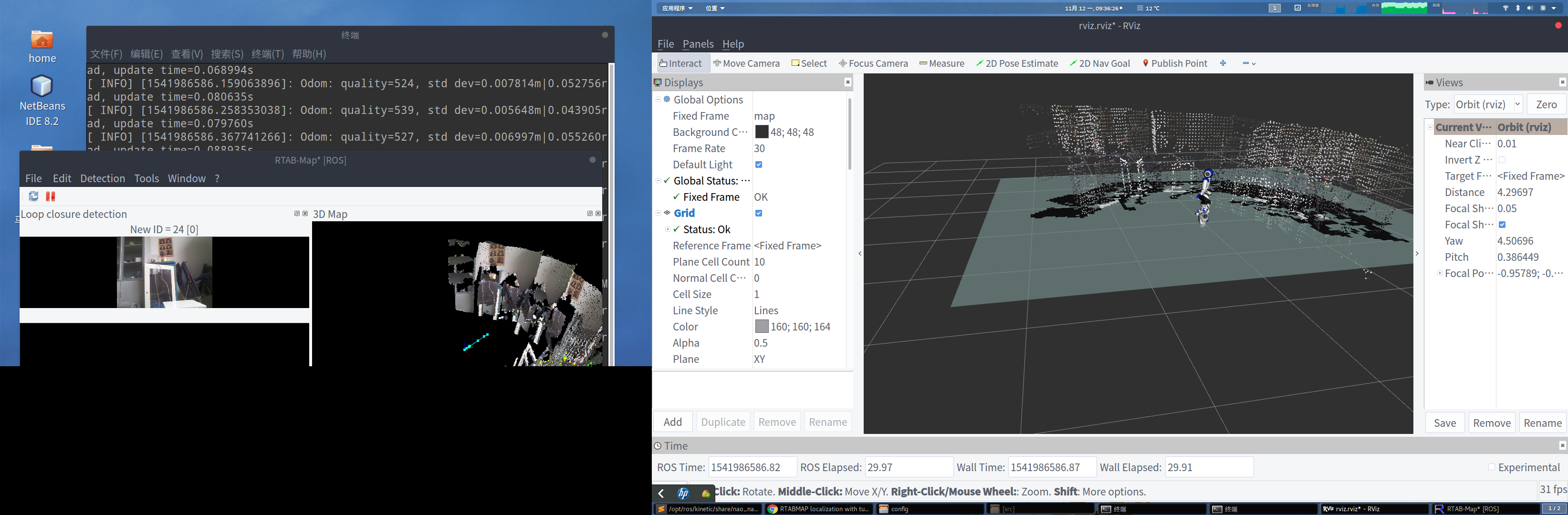
but when i set it to true ,it will be so many the same things in my rviz and the robot model is wrong
Yours
Robin
URL: http://official-rtab-map-forum.206.s1.nabble.com/Error-when-run-rtabmap-ros-on-Nao-robot-tp5110p5180.html
Hi!,
I have another questions that if I set the visual_odometry false ,the graph in rviz is ok like this
but when i running the costmap ,it shows that Timed out waiting for transform from base_link to rtabmap/grid_m ap to become available before running costmap.
but when i set it to true ,it will be so many the same things in my rviz and the robot model is wrong
Yours
Robin
| Free forum by Nabble | Edit this page |