Re: How to use rtabmap_ros/data_throttle for Realsense camera?
Posted by khlau on
URL: http://official-rtab-map-forum.206.s1.nabble.com/How-to-use-rtabmap-ros-data-throttle-for-Realsense-camera-tp5198p5206.html
using
so I am going to use mine .launch config. but using /camera/depth/image_rect_raw instead of /camera/aligned_depth_to_color/image_raw since there is messages from /depth/image_rect_raw but not from aligned_depth_to_color/image_raw
I run this on rasp pi
$ roslaunch my_realsense2_camera_throttle.launch rate:=5
I run this(from http://wiki.ros.org/rtabmap_ros/Tutorials/RemoteMapping) on my pc
$ roslaunch rtabmap_ros rtabmap.launch \
rgb_topic:=/camera/data_throttled_image \
depth_topic:=/camera/data_throttled_image_depth \
camera_info_topic:=/camera/data_throttled_camera_info \
compressed:=true \
rtabmap_args:="--delete_db_on_start" \
rviz:=true rtabmapviz:=false
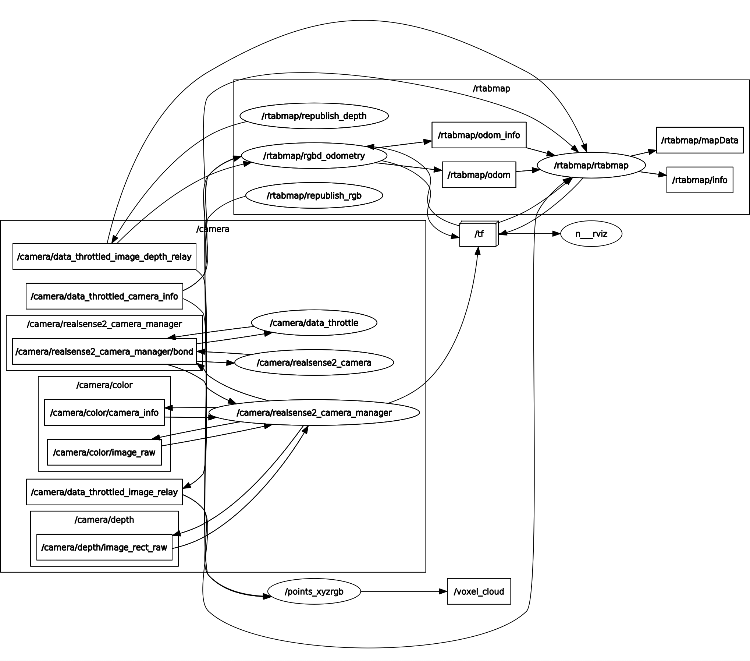
and result this rqt_graph which is hard to see the overlap part but very clean to see there is no connection between camear/color and camera/data_throttled
$ rosnode info data_throttle
--------------------------------------------------------------------------------
Node [/data_throttle]
Publications: None
Subscriptions: None
Services: None
cannot contact [/data_throttle]: unknown node
$ rostopic hz /camera/color/image_raw
subscribed to [/camera/color/image_raw]
average rate: 2.811
min: 0.356s max: 0.356s std dev: 0.00000s window: 2
average rate: 2.640
min: 0.356s max: 0.393s std dev: 0.01502s window: 5
average rate: 2.530
min: 0.356s max: 0.432s std dev: 0.02640s window: 7
average rate: 2.527
min: 0.356s max: 0.432s std dev: 0.02343s window: 9
average rate: 2.447
min: 0.356s max: 0.453s std dev: 0.02969s window: 12
average rate: 2.384
min: 0.356s max: 0.539s std dev: 0.04592s window: 13
average rate: 2.358
min: 0.356s max: 0.539s std dev: 0.04670s window: 16
$ rostopic hz /camera/aligned_depth_to_color/image_raw
subscribed to [/camera/aligned_depth_to_color/image_raw]
no new messages
no new messages
no new messages
no new messages
no new messages
$ rostopic hz /camera/depth/image_rect_raw
subscribed to [/camera/depth/image_rect_raw]
no new messages
no new messages
no new messages
no new messages
no new messages
average rate: 0.405
min: 2.468s max: 2.468s std dev: 0.00000s window: 2
no new messages
no new messages
$ rostopic hz /camera/color/camera_info
subscribed to [/camera/color/camera_info]
average rate: 29.768
min: 0.025s max: 0.039s std dev: 0.00335s window: 24
average rate: 29.772
min: 0.003s max: 0.176s std dev: 0.02086s window: 58
average rate: 29.777
min: 0.003s max: 0.176s std dev: 0.01748s window: 88
average rate: 29.744
min: 0.000s max: 0.182s std dev: 0.02134s window: 118
average rate: 29.771
min: 0.000s max: 0.182s std dev: 0.01925s window: 147
$ rostopic hz /data_throttled_image_relay
subscribed to [/data_throttled_image_relay]
no new messages
no new messages
no new messages
no new messages
$ rostopic hz /depth_registered/image_raw_relay
subscribed to [/depth_registered/image_raw_relay]
no new messages
no new messages
$ rostopic hz /data_throttled_camera_info
subscribed to [/data_throttled_camera_info]
no new messages
no new messages
no new messages
My Question:
1. I have the word 'relay','republish', 'data_throttled', 'compress' and 'image_transport' in my mind after google a lot but I don't understand how should they work together in this case? Can you briefly explain here?
2. Anyone know how "args="load rtabmap_ros/data_throttle camera_nodelet_manager"" in this .launch( from http://wiki.ros.org/rtabmap_ros/Tutorials/SetupOnYourRobot )???
I tried to find camera_nodelet_manager but I can't.
thx for your time!!!!
URL: http://official-rtab-map-forum.206.s1.nabble.com/How-to-use-rtabmap-ros-data-throttle-for-Realsense-camera-tp5198p5206.html
using
<node pkg="nodelet" type="nodelet" name="data_throttle" args="standalone rtabmap_ros/data_throttle " output="screen">cause either the raspi reboot or hang ( rcu_preemp deteced stalls on CPU/Tasks)
so I am going to use mine .launch config. but using /camera/depth/image_rect_raw instead of /camera/aligned_depth_to_color/image_raw since there is messages from /depth/image_rect_raw but not from aligned_depth_to_color/image_raw
I run this on rasp pi
$ roslaunch my_realsense2_camera_throttle.launch rate:=5
I run this(from http://wiki.ros.org/rtabmap_ros/Tutorials/RemoteMapping) on my pc
$ roslaunch rtabmap_ros rtabmap.launch \
rgb_topic:=/camera/data_throttled_image \
depth_topic:=/camera/data_throttled_image_depth \
camera_info_topic:=/camera/data_throttled_camera_info \
compressed:=true \
rtabmap_args:="--delete_db_on_start" \
rviz:=true rtabmapviz:=false
and result this rqt_graph which is hard to see the overlap part but very clean to see there is no connection between camear/color and camera/data_throttled
$ rosnode info data_throttle
--------------------------------------------------------------------------------
Node [/data_throttle]
Publications: None
Subscriptions: None
Services: None
cannot contact [/data_throttle]: unknown node
$ rostopic hz /camera/color/image_raw
subscribed to [/camera/color/image_raw]
average rate: 2.811
min: 0.356s max: 0.356s std dev: 0.00000s window: 2
average rate: 2.640
min: 0.356s max: 0.393s std dev: 0.01502s window: 5
average rate: 2.530
min: 0.356s max: 0.432s std dev: 0.02640s window: 7
average rate: 2.527
min: 0.356s max: 0.432s std dev: 0.02343s window: 9
average rate: 2.447
min: 0.356s max: 0.453s std dev: 0.02969s window: 12
average rate: 2.384
min: 0.356s max: 0.539s std dev: 0.04592s window: 13
average rate: 2.358
min: 0.356s max: 0.539s std dev: 0.04670s window: 16
$ rostopic hz /camera/aligned_depth_to_color/image_raw
subscribed to [/camera/aligned_depth_to_color/image_raw]
no new messages
no new messages
no new messages
no new messages
no new messages
$ rostopic hz /camera/depth/image_rect_raw
subscribed to [/camera/depth/image_rect_raw]
no new messages
no new messages
no new messages
no new messages
no new messages
average rate: 0.405
min: 2.468s max: 2.468s std dev: 0.00000s window: 2
no new messages
no new messages
$ rostopic hz /camera/color/camera_info
subscribed to [/camera/color/camera_info]
average rate: 29.768
min: 0.025s max: 0.039s std dev: 0.00335s window: 24
average rate: 29.772
min: 0.003s max: 0.176s std dev: 0.02086s window: 58
average rate: 29.777
min: 0.003s max: 0.176s std dev: 0.01748s window: 88
average rate: 29.744
min: 0.000s max: 0.182s std dev: 0.02134s window: 118
average rate: 29.771
min: 0.000s max: 0.182s std dev: 0.01925s window: 147
$ rostopic hz /data_throttled_image_relay
subscribed to [/data_throttled_image_relay]
no new messages
no new messages
no new messages
no new messages
$ rostopic hz /depth_registered/image_raw_relay
subscribed to [/depth_registered/image_raw_relay]
no new messages
no new messages
$ rostopic hz /data_throttled_camera_info
subscribed to [/data_throttled_camera_info]
no new messages
no new messages
no new messages
My Question:
1. I have the word 'relay','republish', 'data_throttled', 'compress' and 'image_transport' in my mind after google a lot but I don't understand how should they work together in this case? Can you briefly explain here?
2. Anyone know how "args="load rtabmap_ros/data_throttle camera_nodelet_manager"" in this .launch( from http://wiki.ros.org/rtabmap_ros/Tutorials/SetupOnYourRobot )???
<!-- Throttling messages -->
<group ns="camera">
<node pkg="nodelet" type="nodelet" name="data_throttle" args="load rtabmap_ros/data_throttle camera_nodelet_manager" output="screen">
<param name="rate" type="double" value="5.0"/>
<remap from="rgb/image_in" to="rgb/image_rect_color"/>
<remap from="depth/image_in" to="depth_registered/image_raw"/>
<remap from="rgb/camera_info_in" to="rgb/camera_info"/>
<remap from="rgb/image_out" to="data_throttled_image"/>
<remap from="depth/image_out" to="data_throttled_image_depth"/>
<remap from="rgb/camera_info_out" to="data_throttled_camera_info"/>
</node>
</group>I tried to find camera_nodelet_manager but I can't.
thx for your time!!!!
| Free forum by Nabble | Edit this page |