Re: How to use rtabmap_ros/data_throttle for Realsense camera?
Posted by khlau on
URL: http://official-rtab-map-forum.206.s1.nabble.com/How-to-use-rtabmap-ros-data-throttle-for-Realsense-camera-tp5198p5220.html
First at all, Mathieu, thx for your effort.
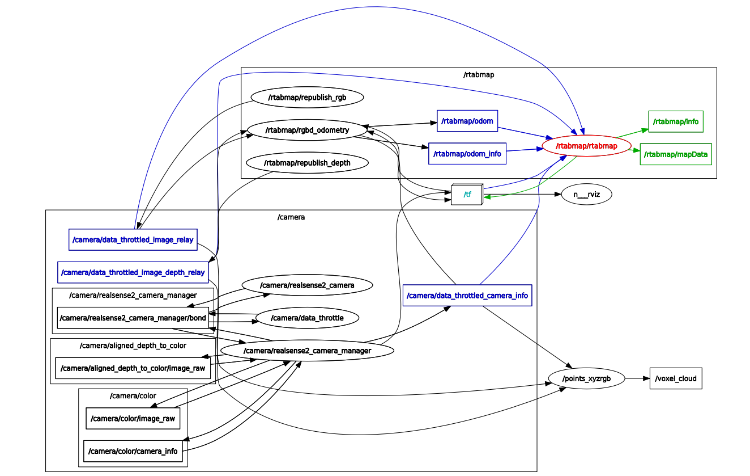
I hv tried your .launch and still not work in my setting. I am curious why I don't see any topic for compressed data in the graph? How can I make sure my setup support compressed data, e.g DS415 ??
Mathieu, how can you get rate 30?
Actually, I always this warning on PC but I think they will disappear after the rqt_graph looks correct
This warning from rasp pi 3:
[ INFO] [1542680511.283879222]: Start updating dynamic parameters...
20/11 10:21:51,400 WARNING [1995505824] (types.cpp:57) start_streaming(...) failed. UVC device is already streaming!
20/11 10:21:51,402 WARNING [1995505824] (types.cpp:57) start_streaming(...) failed. UVC device is already streaming!
20/11 10:21:51,403 WARNING [1995505824] (types.cpp:57) start_streaming(...) failed. UVC device is already streaming!
20/11 10:21:51,403 WARNING [1995505824] (types.cpp:57) start_streaming(...) failed. UVC device is already streaming!
[ INFO] [1542680511.477625240]: Done updating dynamic parameters...
URL: http://official-rtab-map-forum.206.s1.nabble.com/How-to-use-rtabmap-ros-data-throttle-for-Realsense-camera-tp5198p5220.html
First at all, Mathieu, thx for your effort.
I hv tried your .launch and still not work in my setting. I am curious why I don't see any topic for compressed data in the graph? How can I make sure my setup support compressed data, e.g DS415 ??
Mathieu, how can you get rate 30?
$ rostopic hz /camera/color/camera_info /camera/color/image_raw /camera/aligned_depth_to_color/image_raw
topic rate min_delta max_delta std_dev window
=============================================================================================
/camera/color/camera_info 27.45 9.06e-06 0.4837 0.03231 3912
/camera/color/image_raw 4.78 0.1612 0.5561 0.02674 3912
/camera/aligned_depth_to_color/image_raw 0.02533 32.09 46.86 7.387 680 \Actually, I always this warning on PC but I think they will disappear after the rqt_graph looks correct
[ WARN] [1542682836.496048833]: /rtabmap/rgbd_odometry: Did not receive data since 5 seconds! Make sure the input topics are published ("$ rostopic hz my_topic") and the timestamps in their header are set. Parameter "approx_sync" is false, which means that input topics should have all the exact timestamp for the callback to be called.
/rtabmap/rgbd_odometry subscribed to (exact sync):
/camera/data_throttled_image_relay,
/camera/data_throttled_image_depth_relay,
/camera/data_throttled_camera_info
[ WARN] [1542682837.316805918]: /rtabmap/rtabmap: Did not receive data since 5 seconds! Make sure the input topics are published ("$ rostopic hz my_topic") and the timestamps in their header are set. If topics are coming from different computers, make sure the clocks of the computers are synchronized ("ntpdate"). Parameter "approx_sync" is false, which means that input topics should have all the exact timestamp for the callback to be called.
/rtabmap/rtabmap subscribed to (exact sync):
/rtabmap/odom,
/camera/data_throttled_image_relay,
/camera/data_throttled_image_depth_relay,
/camera/data_throttled_camera_info,
/rtabmap/odom_infoThis warning from rasp pi 3:
[ INFO] [1542680511.283879222]: Start updating dynamic parameters...
20/11 10:21:51,400 WARNING [1995505824] (types.cpp:57) start_streaming(...) failed. UVC device is already streaming!
20/11 10:21:51,402 WARNING [1995505824] (types.cpp:57) start_streaming(...) failed. UVC device is already streaming!
20/11 10:21:51,403 WARNING [1995505824] (types.cpp:57) start_streaming(...) failed. UVC device is already streaming!
20/11 10:21:51,403 WARNING [1995505824] (types.cpp:57) start_streaming(...) failed. UVC device is already streaming!
[ INFO] [1542680511.477625240]: Done updating dynamic parameters...
| Free forum by Nabble | Edit this page |