(Bad 3D map) robot_localization sensor fusion imu and odom
Posted by acp on
URL: http://official-rtab-map-forum.206.s1.nabble.com/Bad-3D-map-robot-localization-sensor-fusion-imu-and-odom-tp5456.html
Dear people
I am using the following sensor_fusion launch file
https://github.com/introlab/rtabmap_ros/blob/master/launch/tests/sensor_fusion.launch
To fuse IMU data /mavros/imu/data with odom from rtabmap rgb-odometry. I have adapted the launch file according to the topics names I get from the ZED camera.
I have recorded a rosbag file.
When I run the rosbag file and the sensor_fusion.launch I get a map which is not good, as you can see it in the picture.
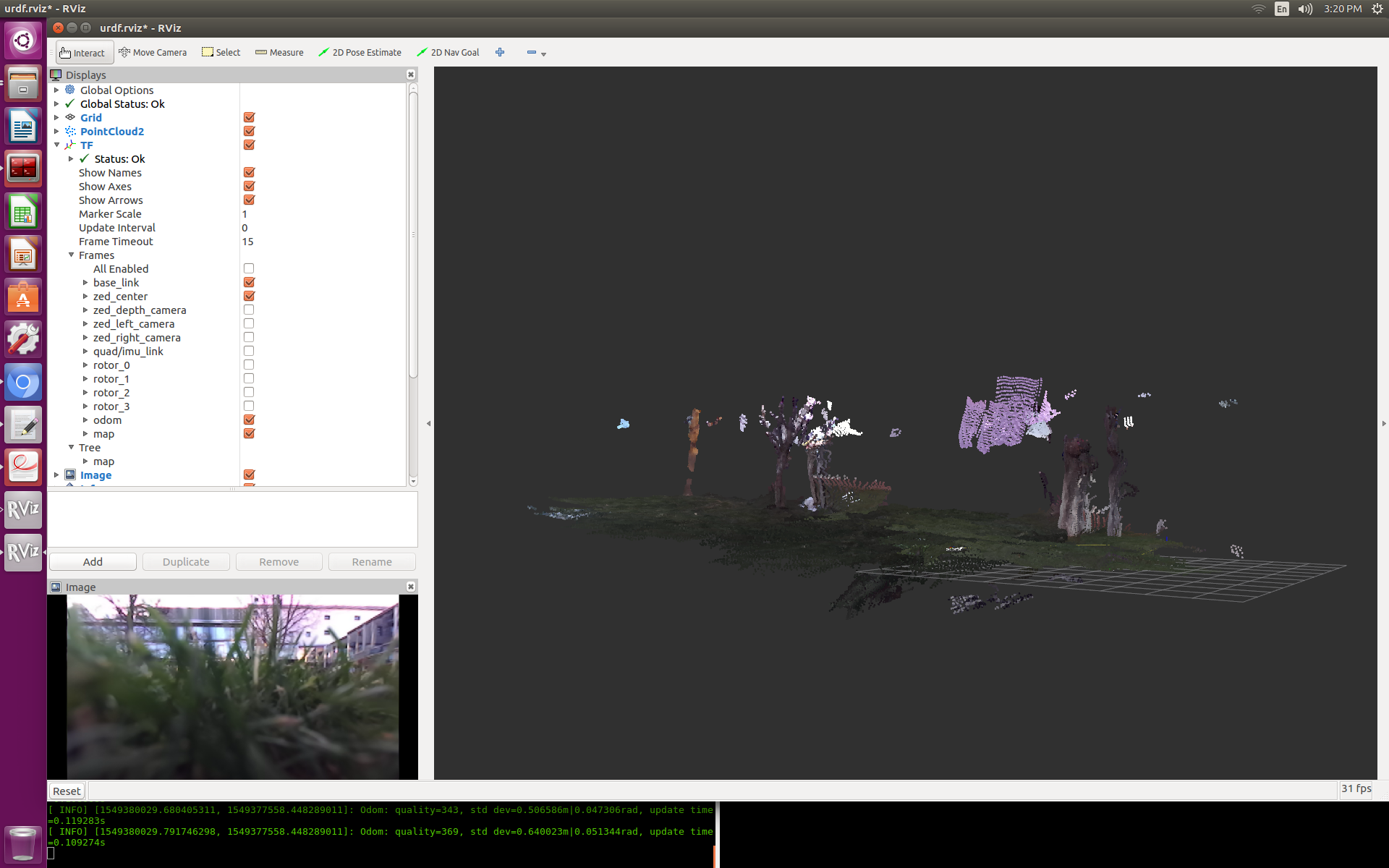
When I run the code I get two warnings.
publishMaps() Graph has changed! The whole cloud is regenerated
and
Registration failed: "Not enough inliers 0/20 (matches=15) between -1 and 73"
Maybe that warnings has to do with getting a bad map
I can post my code if it needed to help me.
Thank you.
URL: http://official-rtab-map-forum.206.s1.nabble.com/Bad-3D-map-robot-localization-sensor-fusion-imu-and-odom-tp5456.html
Dear people
I am using the following sensor_fusion launch file
https://github.com/introlab/rtabmap_ros/blob/master/launch/tests/sensor_fusion.launch
To fuse IMU data /mavros/imu/data with odom from rtabmap rgb-odometry. I have adapted the launch file according to the topics names I get from the ZED camera.
I have recorded a rosbag file.
When I run the rosbag file and the sensor_fusion.launch I get a map which is not good, as you can see it in the picture.
When I run the code I get two warnings.
publishMaps() Graph has changed! The whole cloud is regenerated
and
Registration failed: "Not enough inliers 0/20 (matches=15) between -1 and 73"
Maybe that warnings has to do with getting a bad map
I can post my code if it needed to help me.
Thank you.
| Free forum by Nabble | Edit this page |