Re: (Bad 3D map) robot_localization sensor fusion imu and odom
Posted by matlabbe on
URL: http://official-rtab-map-forum.206.s1.nabble.com/Bad-3D-map-robot-localization-sensor-fusion-imu-and-odom-tp5456p5475.html
Hi,
The depth image seems strange to me. It is like there is a maximum depth. The depth image looks also quite noisy when looking at the 3D point cloud generated.
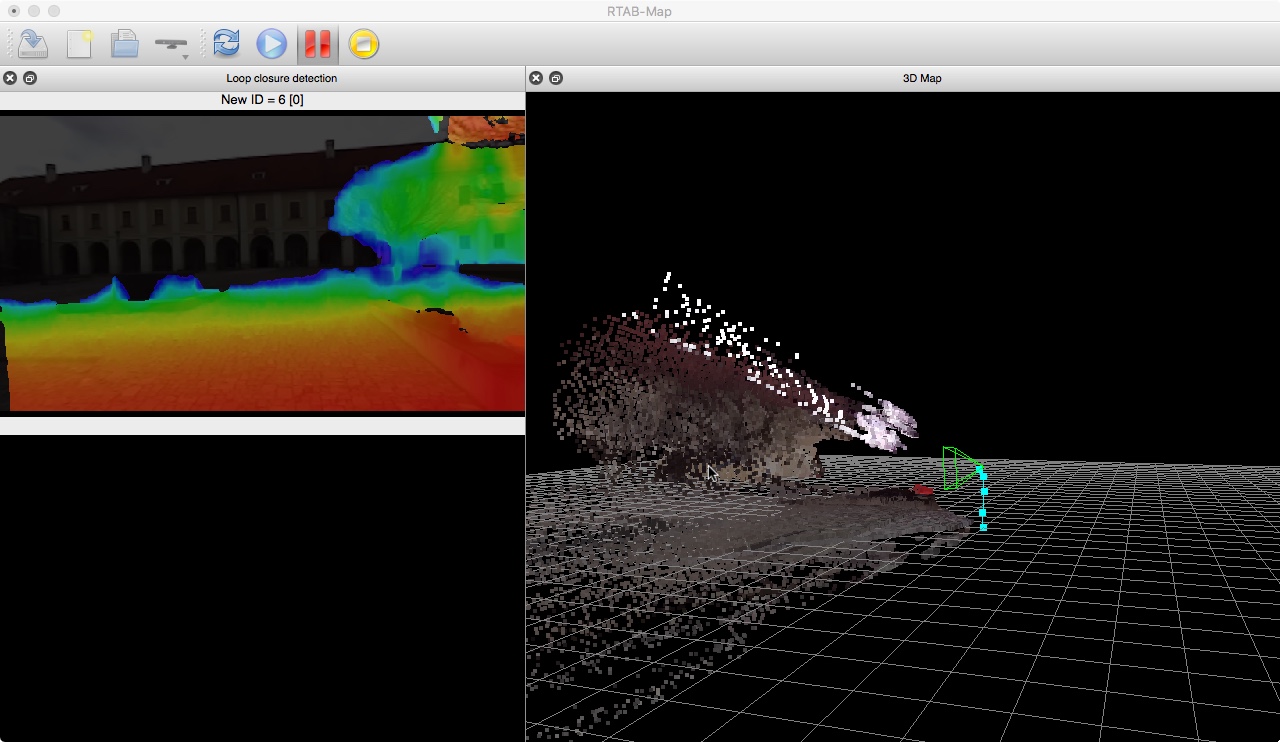
Can you try the stereo version of rtabmap and use left/right images? (subscribe_stereo:=true)
For /odometry/filtered, I cannot really comment on this as it is independent of rtabmap. For NED->ENU conversion, you may look at this post: https://github.com/mavlink/mavros/issues/49
cheers,
Mathieu
URL: http://official-rtab-map-forum.206.s1.nabble.com/Bad-3D-map-robot-localization-sensor-fusion-imu-and-odom-tp5456p5475.html
Hi,
The depth image seems strange to me. It is like there is a maximum depth. The depth image looks also quite noisy when looking at the 3D point cloud generated.
Can you try the stereo version of rtabmap and use left/right images? (subscribe_stereo:=true)
For /odometry/filtered, I cannot really comment on this as it is independent of rtabmap. For NED->ENU conversion, you may look at this post: https://github.com/mavlink/mavros/issues/49
cheers,
Mathieu
| Free forum by Nabble | Edit this page |