Re: (Bad 3D map) robot_localization sensor fusion imu and odom
Posted by acp on
URL: http://official-rtab-map-forum.206.s1.nabble.com/Bad-3D-map-robot-localization-sensor-fusion-imu-and-odom-tp5456p5483.html
Hi Matheiu
I have tried to run
I do not get any cloud.
I sometimes I get the following during the runing of the bag and the launch file.
bagfile: http://www.fit.vutbr.cz/~plascencia/left_right_ned_enu.bag
frames tree: http://www.fit.vutbr.cz/~plascencia/frames_fcu.pdf
1.-launch file for the rosbag: zed_stereoB_fusion_bag_play.launch
2.- With this launch file for the rosbag is working:
zed_visual_odom_true_bag_play.launch
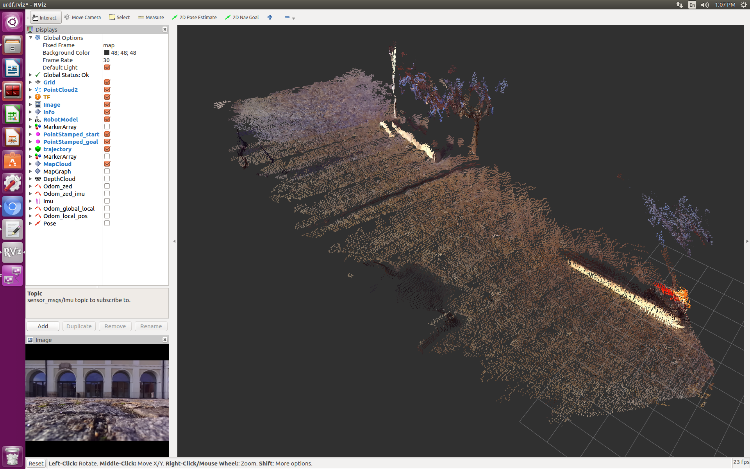
Here is the map, which is not so bad.
Thank you and looking forward to your replay
URL: http://official-rtab-map-forum.206.s1.nabble.com/Bad-3D-map-robot-localization-sensor-fusion-imu-and-odom-tp5456p5483.html
Hi Matheiu
I have tried to run
stereo version of rtabmap using left/right images? (subscribe_stereo:=true)
I do not get any cloud.
I sometimes I get the following during the runing of the bag and the launch file.
[ WARN] (2019-02-13 10:47:51.015) OdometryF2M.cpp:469::computeTransform() Registration failed: "Not enough inliers 10/20 (matches=35) between -1 and 231"
[ WARN] (2019-02-13 10:47:51.017) OdometryF2M.cpp:258::computeTransform() Failed to find a transformation with the provided guess (xyz=0.177359,-0.015194,0.035369 rpy=0.012964,-0.060532,-0.031622), trying again without a guess.
Transform from fcu to base_link was unavailable for the time requested. Using latest instead.
bagfile: http://www.fit.vutbr.cz/~plascencia/left_right_ned_enu.bag
frames tree: http://www.fit.vutbr.cz/~plascencia/frames_fcu.pdf
1.-launch file for the rosbag: zed_stereoB_fusion_bag_play.launch
2.- With this launch file for the rosbag is working:
zed_visual_odom_true_bag_play.launch
Here is the map, which is not so bad.
Thank you and looking forward to your replay
| Free forum by Nabble | Edit this page |