Troubleshooting mapping with kinect v2, rplidar and jetson tx2
Posted by Ross_L on
URL: http://official-rtab-map-forum.206.s1.nabble.com/Troubleshooting-mapping-with-kinect-v2-rplidar-and-jetson-tx2-tp5517.html
Hello
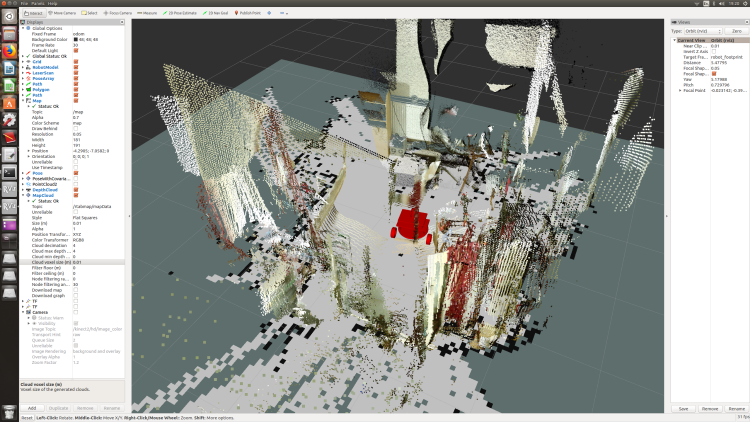
I hope you can help please. I am looking for some suggestions on where to start looking to troubleshoot my robot to work with rgbd mapping. At the moment I am getting a lot of ghosting and smearing, I am guessing due to a lack of loop closures.
My setup is:
Nvidia Jetson TX2
Client PC running rtabmap (GTX 980, i7 5820K)
Kinect V2 running with kinect2_bridge (I am not 100% sure if its working with CUDA or OpenCL)
Roboclaw motor driver which supplies the /odom topic via a python node
2 x servocity dc brushed motors with quadrature encoders
RPLidar A1 publishing to /scan
I have attached my launch files including the bringup and rtabmap launch files
gbot_bringup.launch
rtabmap.launch
I am using the stock kinect2_bridge launch file.
I can view the laser data in the RVIZ window.
I have confirmed that odometry and the laser scan work by testing with gmapping, which produces a good map. The robots movements appear to be accurately represented in RVIZ. I've read through some of the parameter tweaking docs and looked through the forum to see if I can glean some insights, but it would be great if anything seems obvious that I have missed before hunkering down for "tweaking mode"!
Something of concern is whether I am having bandwidth issues. When running the bringup file, the TX2 shows that 40 MiB/s are going across the network. That is going over my standard home wifi. That sounds like a lot! I am running the throttle nodelet. Should the figure be this high?
One of the behaviours I notice is that it takes a long time, sometimes a minute or so, for the 2d map (occupancy map?) to pop up in RVIZ, subscribed to the /map topic. As mentioned it also cannot create an accurate 2d map and suffers the same smearing as the 3d map.
Any pointers would be super appreciated!
Cheers

EDIT: Changed rtabmap launch file as I uploaded the wrong one
URL: http://official-rtab-map-forum.206.s1.nabble.com/Troubleshooting-mapping-with-kinect-v2-rplidar-and-jetson-tx2-tp5517.html
Hello
I hope you can help please. I am looking for some suggestions on where to start looking to troubleshoot my robot to work with rgbd mapping. At the moment I am getting a lot of ghosting and smearing, I am guessing due to a lack of loop closures.
My setup is:
Nvidia Jetson TX2
Client PC running rtabmap (GTX 980, i7 5820K)
Kinect V2 running with kinect2_bridge (I am not 100% sure if its working with CUDA or OpenCL)
Roboclaw motor driver which supplies the /odom topic via a python node
2 x servocity dc brushed motors with quadrature encoders
RPLidar A1 publishing to /scan
I have attached my launch files including the bringup and rtabmap launch files
gbot_bringup.launch
rtabmap.launch
I am using the stock kinect2_bridge launch file.
I can view the laser data in the RVIZ window.
I have confirmed that odometry and the laser scan work by testing with gmapping, which produces a good map. The robots movements appear to be accurately represented in RVIZ. I've read through some of the parameter tweaking docs and looked through the forum to see if I can glean some insights, but it would be great if anything seems obvious that I have missed before hunkering down for "tweaking mode"!
Something of concern is whether I am having bandwidth issues. When running the bringup file, the TX2 shows that 40 MiB/s are going across the network. That is going over my standard home wifi. That sounds like a lot! I am running the throttle nodelet. Should the figure be this high?
One of the behaviours I notice is that it takes a long time, sometimes a minute or so, for the 2d map (occupancy map?) to pop up in RVIZ, subscribed to the /map topic. As mentioned it also cannot create an accurate 2d map and suffers the same smearing as the 3d map.
Any pointers would be super appreciated!
Cheers
EDIT: Changed rtabmap launch file as I uploaded the wrong one
| Free forum by Nabble | Edit this page |