Re: Troubleshooting mapping with kinect v2, rplidar and jetson tx2
Posted by Ross_L on
URL: http://official-rtab-map-forum.206.s1.nabble.com/Troubleshooting-mapping-with-kinect-v2-rplidar-and-jetson-tx2-tp5517p5519.html
Just a latest shot. This is a square room:
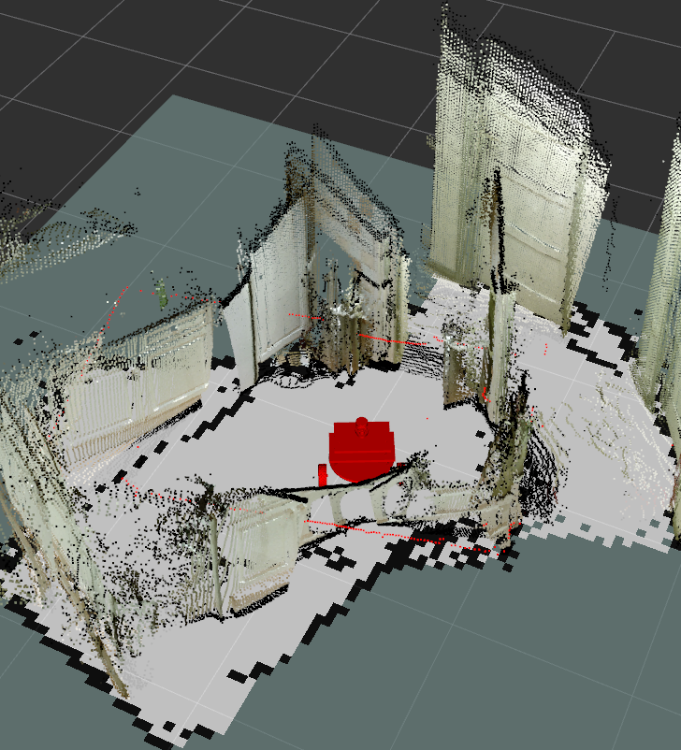
I am a bit concerned about the black edging on the depth cloud, which looks like an uncalibrated cloud However the kinect has been calibrated, at least within the kinect2_bridge package. Should it be calibrated within rtabmapviz? Unfortunately the 'source' menu is grayed out when I run rtabmapviz, so not able to test at present. Any thoughts?
There also seems to be a lot of black 'noise' that only appears in the depth cloud when rtabmap is running.
EDIT: ntpdate output:
Is a hundredth-or-so of a second acceptable here?
Also max depth is set to 4
URL: http://official-rtab-map-forum.206.s1.nabble.com/Troubleshooting-mapping-with-kinect-v2-rplidar-and-jetson-tx2-tp5517p5519.html
Just a latest shot. This is a square room:
I am a bit concerned about the black edging on the depth cloud, which looks like an uncalibrated cloud However the kinect has been calibrated, at least within the kinect2_bridge package. Should it be calibrated within rtabmapviz? Unfortunately the 'source' menu is grayed out when I run rtabmapviz, so not able to test at present. Any thoughts?
There also seems to be a lot of black 'noise' that only appears in the depth cloud when rtabmap is running.
EDIT: ntpdate output:
server 192.168.1.99, stratum 2, offset 0.015392, delay 0.05731 17 Feb 11:13:05 ntpdate[7327]: adjust time server 192.168.1.99 offset 0.015392 sec
Is a hundredth-or-so of a second acceptable here?
Also max depth is set to 4
| Free forum by Nabble | Edit this page |