Re: misalignment from tango multi session
Posted by sDeboffle on
URL: http://official-rtab-map-forum.206.s1.nabble.com/misalignment-from-tango-multi-session-tp5046p5528.html
Hi,
I'm currently having some trouble to setup the Quanergy lidar with rtabmap and rtabmap_ros.
As far as I understand, the quanergy_client_ros that I have posts its points datas on a topic named `/Sensor/points`.
The fact is that I can't see any points on rtabmap.
Here's the steps I followed:
First I launch the quanergy_client_ros with a basic launch file:
`roslaunch quanergy_client_ros client.launch`
client.launch:
```
<?xml version="1.0" encoding="UTF-8"?>
<launch>
<arg name="host" default="10.10.1.66"/>
<arg name="ns" default="Sensor" />
<arg name="return" default="0" />
<arg name="maxCloudSize" default="-1" />
<group ns="$(arg ns)">
<node name="client_node"
pkg="quanergy_client_ros"
type="client_node"
args="--host $(arg host) --settings $(find quanergy_client_ros)/settings/client.xml --frame $(arg ns) --return $(arg return) --max-cloud $(arg maxCloudSize)"
required="true"
output="screen"/>
</group>
</launch>
```
Then I listen to the `/Sensor/points` topic to be sure that the lidar and ros are communicating on this particular topic.
`rostopic hz /Sensor/points`
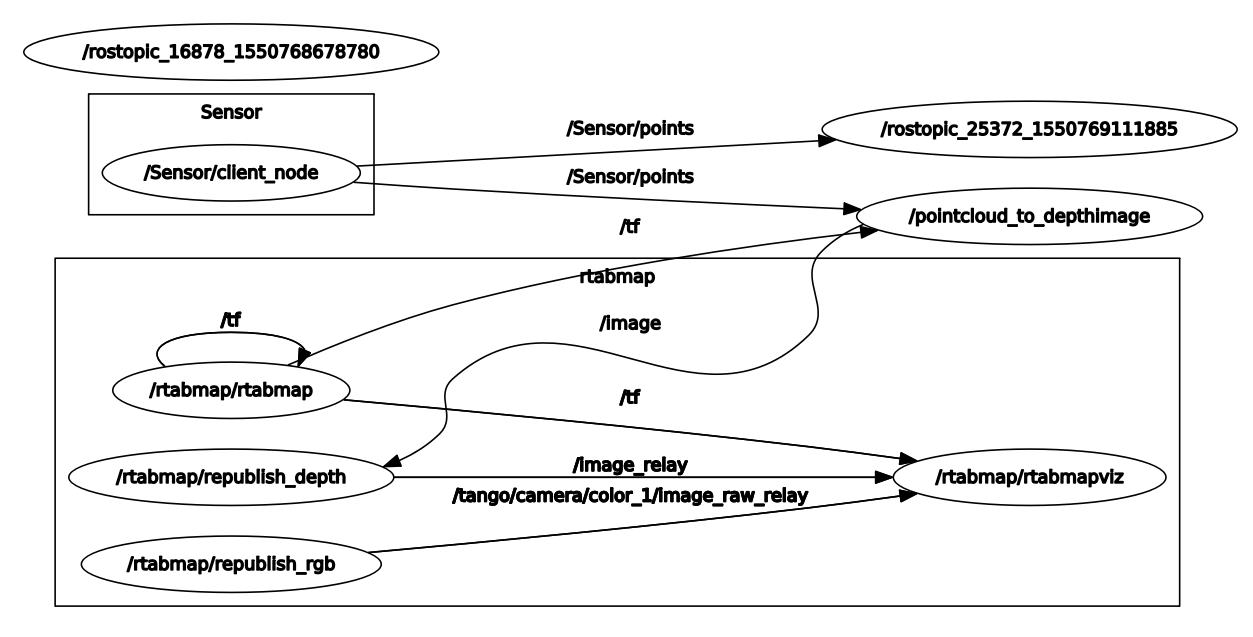
Then I run another ros package, `pointcloud_to_depthimage` and set the cloud parameter to the `/Sensor/points` topic so that rtabmap can get the point cloud from the lidar and display it - this point may be where I'm wrong right now
`rosrun rtabmap_ros pointcloud_to_depthimage cloud:=/Sensor/point _fixed_frame_id:=start_of_service _decimation:=8 _fill_holes_size:=5`
Finally, I launch rtabmap_ros with the `rtabmap.launch` file. It opens rtabmap but the point cloud doesn't appear.
`roslaunch rtabmap_ros rtabmap.launch rtabmap_args:="--delete_db_on_start --Mem/ImagePreDecimation 2 --Mem/ImagePostDecimation 2" visual_odometry:=false odom_frame_id:="start_of_service" frame_id:="device" rgb_topic:=/tango/camera/color_1/image_raw depth_topic:=/image camera_info_topic:=/tango/camera/color_1/camera_info compressed:=true depth_image_transport:=raw approx_sync:=false`
Do you have an idea of where is the problem?
Thank you.
URL: http://official-rtab-map-forum.206.s1.nabble.com/misalignment-from-tango-multi-session-tp5046p5528.html
Hi,
I'm currently having some trouble to setup the Quanergy lidar with rtabmap and rtabmap_ros.
As far as I understand, the quanergy_client_ros that I have posts its points datas on a topic named `/Sensor/points`.
The fact is that I can't see any points on rtabmap.
Here's the steps I followed:
First I launch the quanergy_client_ros with a basic launch file:
`roslaunch quanergy_client_ros client.launch`
client.launch:
```
<?xml version="1.0" encoding="UTF-8"?>
<launch>
<arg name="host" default="10.10.1.66"/>
<arg name="ns" default="Sensor" />
<arg name="return" default="0" />
<arg name="maxCloudSize" default="-1" />
<group ns="$(arg ns)">
<node name="client_node"
pkg="quanergy_client_ros"
type="client_node"
args="--host $(arg host) --settings $(find quanergy_client_ros)/settings/client.xml --frame $(arg ns) --return $(arg return) --max-cloud $(arg maxCloudSize)"
required="true"
output="screen"/>
</group>
</launch>
```
Then I listen to the `/Sensor/points` topic to be sure that the lidar and ros are communicating on this particular topic.
`rostopic hz /Sensor/points`
Then I run another ros package, `pointcloud_to_depthimage` and set the cloud parameter to the `/Sensor/points` topic so that rtabmap can get the point cloud from the lidar and display it - this point may be where I'm wrong right now
`rosrun rtabmap_ros pointcloud_to_depthimage cloud:=/Sensor/point _fixed_frame_id:=start_of_service _decimation:=8 _fill_holes_size:=5`
Finally, I launch rtabmap_ros with the `rtabmap.launch` file. It opens rtabmap but the point cloud doesn't appear.
`roslaunch rtabmap_ros rtabmap.launch rtabmap_args:="--delete_db_on_start --Mem/ImagePreDecimation 2 --Mem/ImagePostDecimation 2" visual_odometry:=false odom_frame_id:="start_of_service" frame_id:="device" rgb_topic:=/tango/camera/color_1/image_raw depth_topic:=/image camera_info_topic:=/tango/camera/color_1/camera_info compressed:=true depth_image_transport:=raw approx_sync:=false`
Do you have an idea of where is the problem?
Thank you.
| Free forum by Nabble | Edit this page |