Re: misalignment from tango multi session
Posted by sDeboffle on
URL: http://official-rtab-map-forum.206.s1.nabble.com/misalignment-from-tango-multi-session-tp5046p5540.html
Hi mathieu
I tried a lot of things but I think I don't understand well how all that work.
I'm able to connect tango ros steamer to rviz and actually see the pointcloud.
We also use a Quanergy lidar. The only published topic is /Lidar/points. It's PointCloud2 data.
I'm able to add a second pointCloud2 in Rviz and link /Lidar/points topic to this PointCloud2.
But I have transform problem (show the image)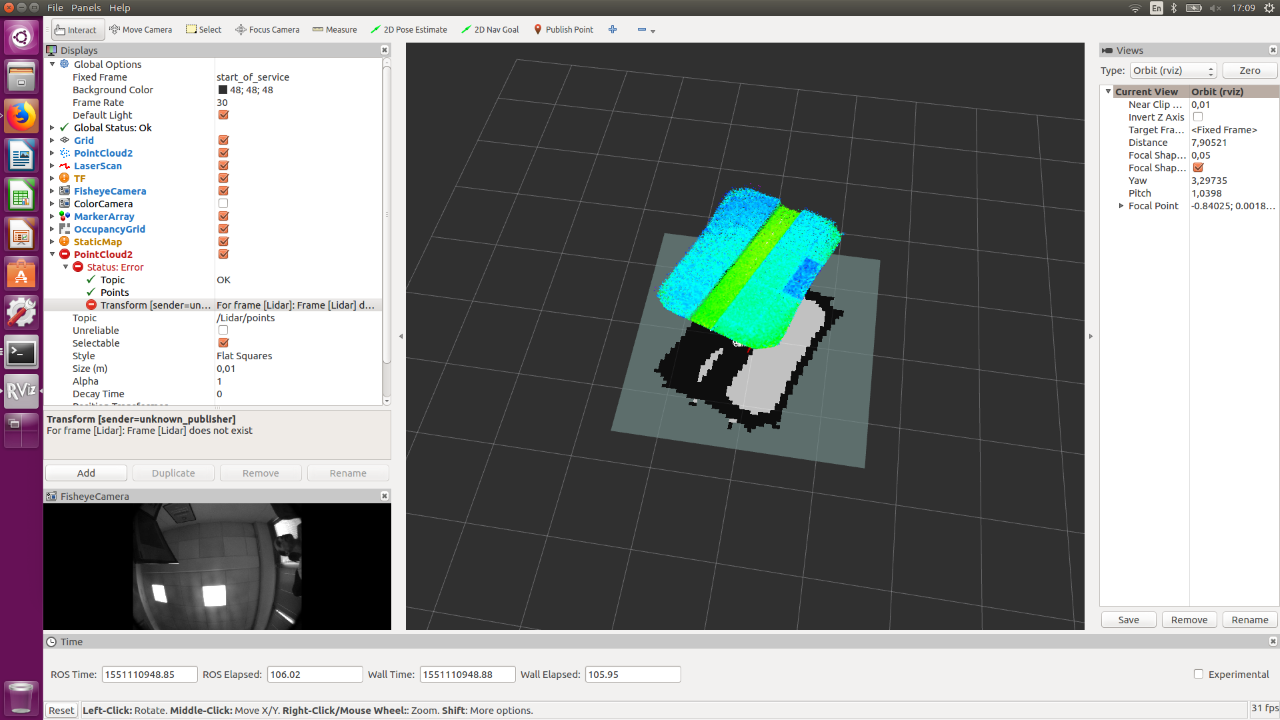
so I don't see lidar points.
I assume the lidar need a tf to work with Rviz. How can I provide a tf to my lidar if I want to use it alone?
this is my lidar launch file
<?xml version="1.0" encoding="UTF-8"?>
<launch>
<arg name="host" />
<arg name="ns" default="Sensor" />
<arg name="return" default="0" />
<arg name="maxCloudSize" default="-1" />
<group ns="$(arg ns)">
<node name="client_node"
pkg="quanergy_client_ros"
type="client_node"
args="--host $(arg host) --settings $(find quanergy_client_ros)/settings/client.xml --frame $(arg ns) --return $(arg return) --max-cloud $(arg maxCloudSize)"
required="true"
output="screen"/>
</group>
</launch>
but that's don't work.
then I try this command:
rosrun tf static_transform_publisher 0 0 0 0 0 0 1 map TestName 10.
After that, I'm able to change map to "TestName" in global option >fixed frame, but same error message.
What did I miss?
my final goal here is to use both lidar and tango, and make a 3D map in rtab-map.
Is there a way to connect tango TF to this second pointCloud2?
How can I transfert all that data to rtab to make a 3D map?
thank you
URL: http://official-rtab-map-forum.206.s1.nabble.com/misalignment-from-tango-multi-session-tp5046p5540.html
Hi mathieu
I tried a lot of things but I think I don't understand well how all that work.
I'm able to connect tango ros steamer to rviz and actually see the pointcloud.
We also use a Quanergy lidar. The only published topic is /Lidar/points. It's PointCloud2 data.
I'm able to add a second pointCloud2 in Rviz and link /Lidar/points topic to this PointCloud2.
But I have transform problem (show the image)
so I don't see lidar points.
I assume the lidar need a tf to work with Rviz. How can I provide a tf to my lidar if I want to use it alone?
this is my lidar launch file
<?xml version="1.0" encoding="UTF-8"?>
<launch>
<arg name="host" />
<arg name="ns" default="Sensor" />
<arg name="return" default="0" />
<arg name="maxCloudSize" default="-1" />
<group ns="$(arg ns)">
<node name="client_node"
pkg="quanergy_client_ros"
type="client_node"
args="--host $(arg host) --settings $(find quanergy_client_ros)/settings/client.xml --frame $(arg ns) --return $(arg return) --max-cloud $(arg maxCloudSize)"
required="true"
output="screen"/>
</group>
</launch>
but that's don't work.
then I try this command:
rosrun tf static_transform_publisher 0 0 0 0 0 0 1 map TestName 10.
After that, I'm able to change map to "TestName" in global option >fixed frame, but same error message.
What did I miss?
my final goal here is to use both lidar and tango, and make a 3D map in rtab-map.
Is there a way to connect tango TF to this second pointCloud2?
How can I transfert all that data to rtab to make a 3D map?
thank you
| Free forum by Nabble | Edit this page |