Re: Welcome! (and code snippet formatting example!)
Posted by matlabbe on
URL: http://official-rtab-map-forum.206.s1.nabble.com/Welcome-and-code-snippet-formatting-example-tp3p5571.html
URL: http://official-rtab-map-forum.206.s1.nabble.com/Welcome-and-code-snippet-formatting-example-tp3p5571.html
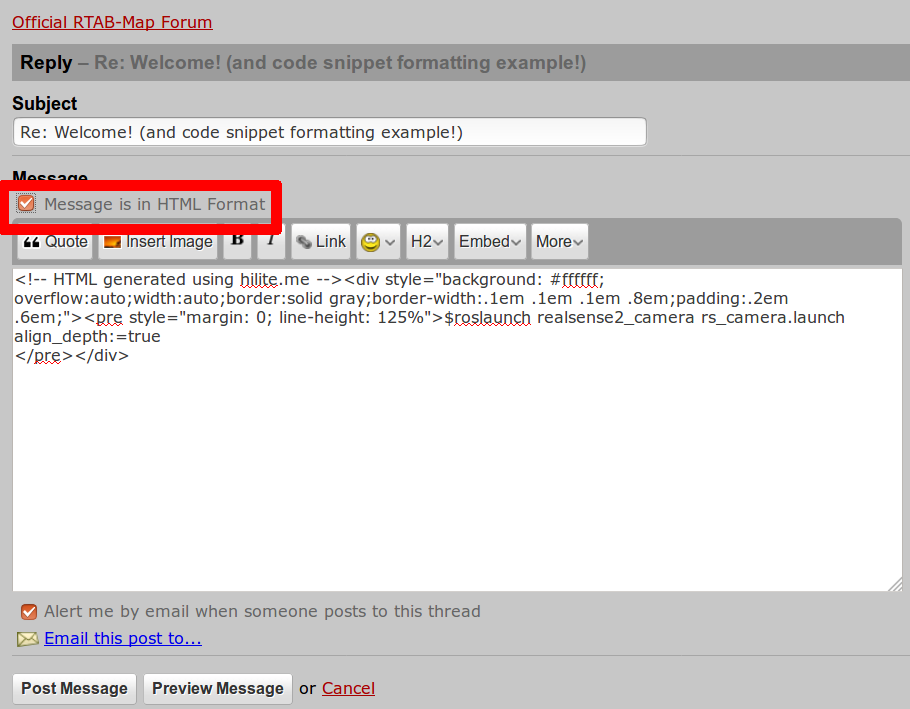
$roslaunch realsense2_camera rs_camera.launch align_depth:=true
Make sure to click on "Message is in HTML Format" when editing the message:
| Free forum by Nabble | Edit this page |