Re: Troubleshooting mapping with kinect v2, rplidar and jetson tx2
Posted by Ross_L on
URL: http://official-rtab-map-forum.206.s1.nabble.com/Troubleshooting-mapping-with-kinect-v2-rplidar-and-jetson-tx2-tp5517p5608.html
To answer your question, I am using wifi, however I also tested using a LAN cable. No improvement, and as I found out this was not the issue. I never saw a repeat of the empty header so I have no idea what happened there! :)
Instead I increased the queue size to 50 and it now happily updates continuously. I had tried changing this before but had "type" as string when it should be int and so it did not work.
One strange thing though, it refuses to work with rtabmap/rgbd_image/comrpessedas you mention above, and will only work if rtabmap is subscribing to /rgbd_image/compressed. Does this matter or is it fine as long as its receiving rgbd_image/compressed in one form or another?
Sadly, the map still has the same problems as before, if not more so after pre-syncing on the jetson. RGB and depth images seem to be mapped to the wrong things, so for example a table image being mapped onto a wall or blue sky from a window being mapped onto a window frame. NB the kinect has been calibrated via the kinect2_bridge calibration tool and the calibration file put in the correct folder.
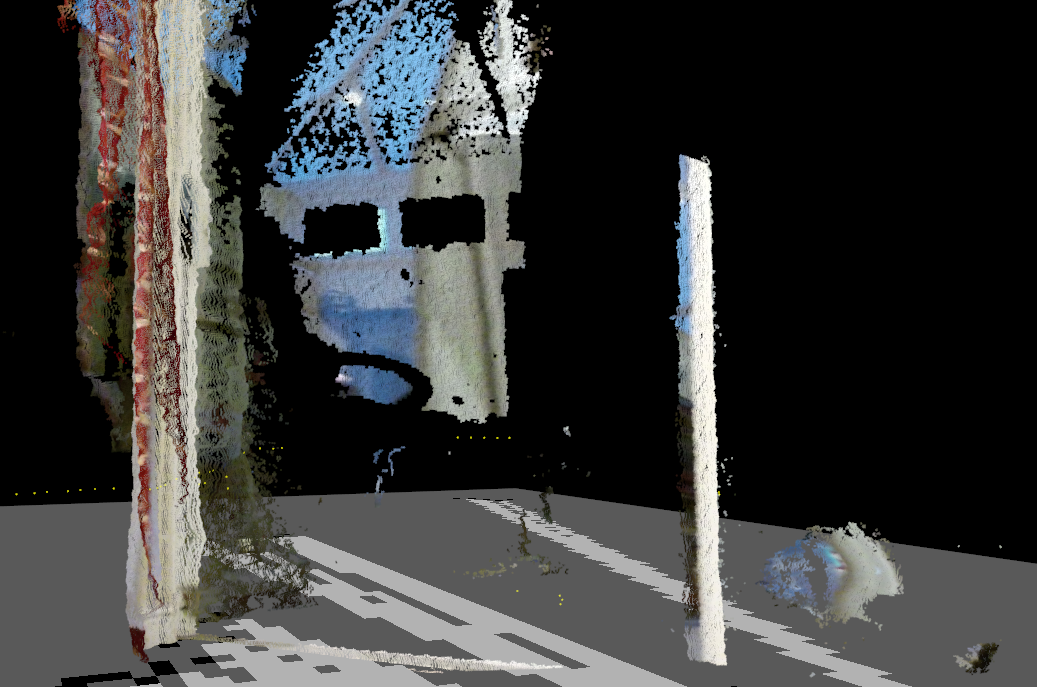

Here is a sample database:
https://drive.google.com/file/d/1KZHv3ize2LI5DoFg6LTD2BOwAJDX9UEW/view?usp=sharing
Could this still be caused by the discrepancy in the odometry I mentioned before? I have one wheel reporting 40 counts per rev more than the other due to a hardware problem and am waiting for a new motor.
URL: http://official-rtab-map-forum.206.s1.nabble.com/Troubleshooting-mapping-with-kinect-v2-rplidar-and-jetson-tx2-tp5517p5608.html
To answer your question, I am using wifi, however I also tested using a LAN cable. No improvement, and as I found out this was not the issue. I never saw a repeat of the empty header so I have no idea what happened there! :)
Instead I increased the queue size to 50 and it now happily updates continuously. I had tried changing this before but had "type" as string when it should be int and so it did not work.
One strange thing though, it refuses to work with rtabmap/rgbd_image/comrpessedas you mention above, and will only work if rtabmap is subscribing to /rgbd_image/compressed. Does this matter or is it fine as long as its receiving rgbd_image/compressed in one form or another?
Sadly, the map still has the same problems as before, if not more so after pre-syncing on the jetson. RGB and depth images seem to be mapped to the wrong things, so for example a table image being mapped onto a wall or blue sky from a window being mapped onto a window frame. NB the kinect has been calibrated via the kinect2_bridge calibration tool and the calibration file put in the correct folder.
Here is a sample database:
https://drive.google.com/file/d/1KZHv3ize2LI5DoFg6LTD2BOwAJDX9UEW/view?usp=sharing
Could this still be caused by the discrepancy in the odometry I mentioned before? I have one wheel reporting 40 counts per rev more than the other due to a hardware problem and am waiting for a new motor.
| Free forum by Nabble | Edit this page |