Re: Troubleshooting mapping with kinect v2, rplidar and jetson tx2
Posted by Ross_L on
URL: http://official-rtab-map-forum.206.s1.nabble.com/Troubleshooting-mapping-with-kinect-v2-rplidar-and-jetson-tx2-tp5517p5618.html
Hi
Hmm looks like we might be closing in on the issue! It seems that the TX2 does not support OpenCL, so is defaulting to CPU depth registration. I have CUDA set as the depth processing method and I do not see any references or errors to depth method when kinect2_bridge starts, so I am assuming that CUDA is working (this comes pre-installed on the Jetson as you cannot install the CUDA toolkit separetely for some reason).
I checked and have approx_sync set to false for both throttle and rgbd_sync.
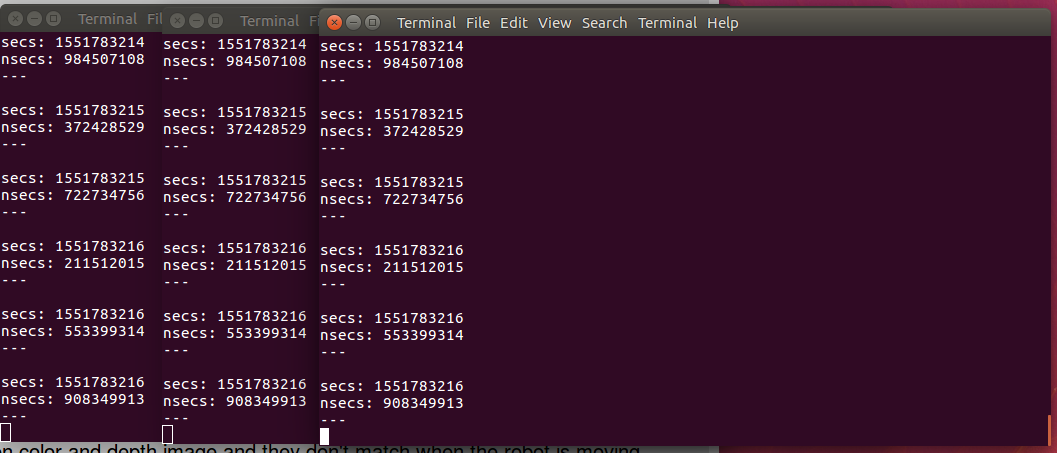
Here are the timestamp echos. They seem to line up ok:
Re: the topic names, I have exactly that in my launch file on the jetson:
But still for some weird reason rtabmap doesn't like it. Is this a problem?
Is lack of OpenCL a dealbreaker? I can try switching to the laptop again, but that seemed to suffer from similar problems. That said I could not build CUDA on the laptop due to a bizarre combination of graphics drivers (my laptop has optimus graphics with an old CUDA capable GTX460M) and gcc versions required by CUDA. So the laptop has been using OpenGL and OpenCL.
The laptop also really seems to protest at having three USB items attached even with the hub powered. I've been experimenting with powering the laptop via a boost converter plugged to the lipo (4S, 4500MAh, 40C), to give it power via the DC jack, but the jetson is a much more elegant solution.
Do you know of anyone that has actually successfuly implemented rtabmap on a jetson?
I am starting to feel like the planets are aligned against me haha
URL: http://official-rtab-map-forum.206.s1.nabble.com/Troubleshooting-mapping-with-kinect-v2-rplidar-and-jetson-tx2-tp5517p5618.html
Hi
Hmm looks like we might be closing in on the issue! It seems that the TX2 does not support OpenCL, so is defaulting to CPU depth registration. I have CUDA set as the depth processing method and I do not see any references or errors to depth method when kinect2_bridge starts, so I am assuming that CUDA is working (this comes pre-installed on the Jetson as you cannot install the CUDA toolkit separetely for some reason).
I checked and have approx_sync set to false for both throttle and rgbd_sync.
Here are the timestamp echos. They seem to line up ok:
Re: the topic names, I have exactly that in my launch file on the jetson:
<remap from="rgbd_image" to="/rtabmap/rgbd_image"/> <!-- output -->
But still for some weird reason rtabmap doesn't like it. Is this a problem?
Is lack of OpenCL a dealbreaker? I can try switching to the laptop again, but that seemed to suffer from similar problems. That said I could not build CUDA on the laptop due to a bizarre combination of graphics drivers (my laptop has optimus graphics with an old CUDA capable GTX460M) and gcc versions required by CUDA. So the laptop has been using OpenGL and OpenCL.
The laptop also really seems to protest at having three USB items attached even with the hub powered. I've been experimenting with powering the laptop via a boost converter plugged to the lipo (4S, 4500MAh, 40C), to give it power via the DC jack, but the jetson is a much more elegant solution.
Do you know of anyone that has actually successfuly implemented rtabmap on a jetson?
I am starting to feel like the planets are aligned against me haha
| Free forum by Nabble | Edit this page |