Re: Troubleshooting mapping with kinect v2, rplidar and jetson tx2
Posted by Ross_L on
URL: http://official-rtab-map-forum.206.s1.nabble.com/Troubleshooting-mapping-with-kinect-v2-rplidar-and-jetson-tx2-tp5517p5619.html
It seems that the problem may lie within kinect2_bridge. This is what happens when I visualise the raw qhd cloud from kinect2_bridge. You can see a white/grey table leg mapped over the book case behind it:
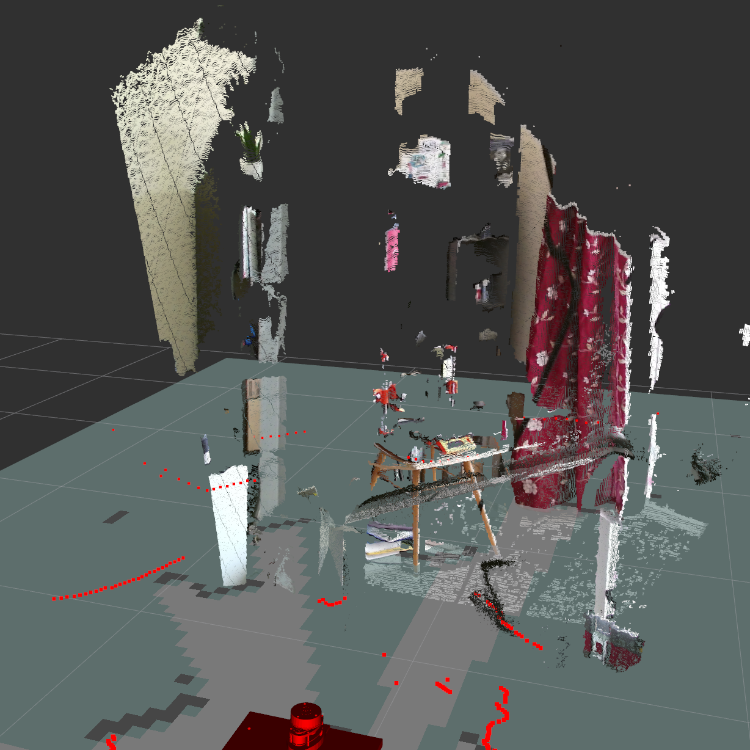
Does this suggest any possible avenues of troubleshooting? EDIT: This seems to happen when the robot is close to something, inside the depth cameras range. However I have min depth set inside RVIZ as 0.8 m, shouldnt it ignore any clouds under this distance?
URL: http://official-rtab-map-forum.206.s1.nabble.com/Troubleshooting-mapping-with-kinect-v2-rplidar-and-jetson-tx2-tp5517p5619.html
It seems that the problem may lie within kinect2_bridge. This is what happens when I visualise the raw qhd cloud from kinect2_bridge. You can see a white/grey table leg mapped over the book case behind it:
Does this suggest any possible avenues of troubleshooting? EDIT: This seems to happen when the robot is close to something, inside the depth cameras range. However I have min depth set inside RVIZ as 0.8 m, shouldnt it ignore any clouds under this distance?
| Free forum by Nabble | Edit this page |