Re: (Bad 3D map) robot_localization sensor fusion imu and odom
Posted by acp on
URL: http://official-rtab-map-forum.206.s1.nabble.com/Bad-3D-map-robot-localization-sensor-fusion-imu-and-odom-tp5456p5655.html
Hi Mathieu
I have recorded a ros bag that contains the following topics among the camera tf as you suggested :)
The bag is:http://www.fit.vutbr.cz/~plascencia/outdoor_tf_zed_enable.bag
Bytheway, I have ploted in a single plot the following topics:
1. /stereo_camera/odom
2. /stereo_camera/rtabmap/odom
3. /odometry/filtered
4. /mavros/local_position/odom
As you can see in the following two pictures:
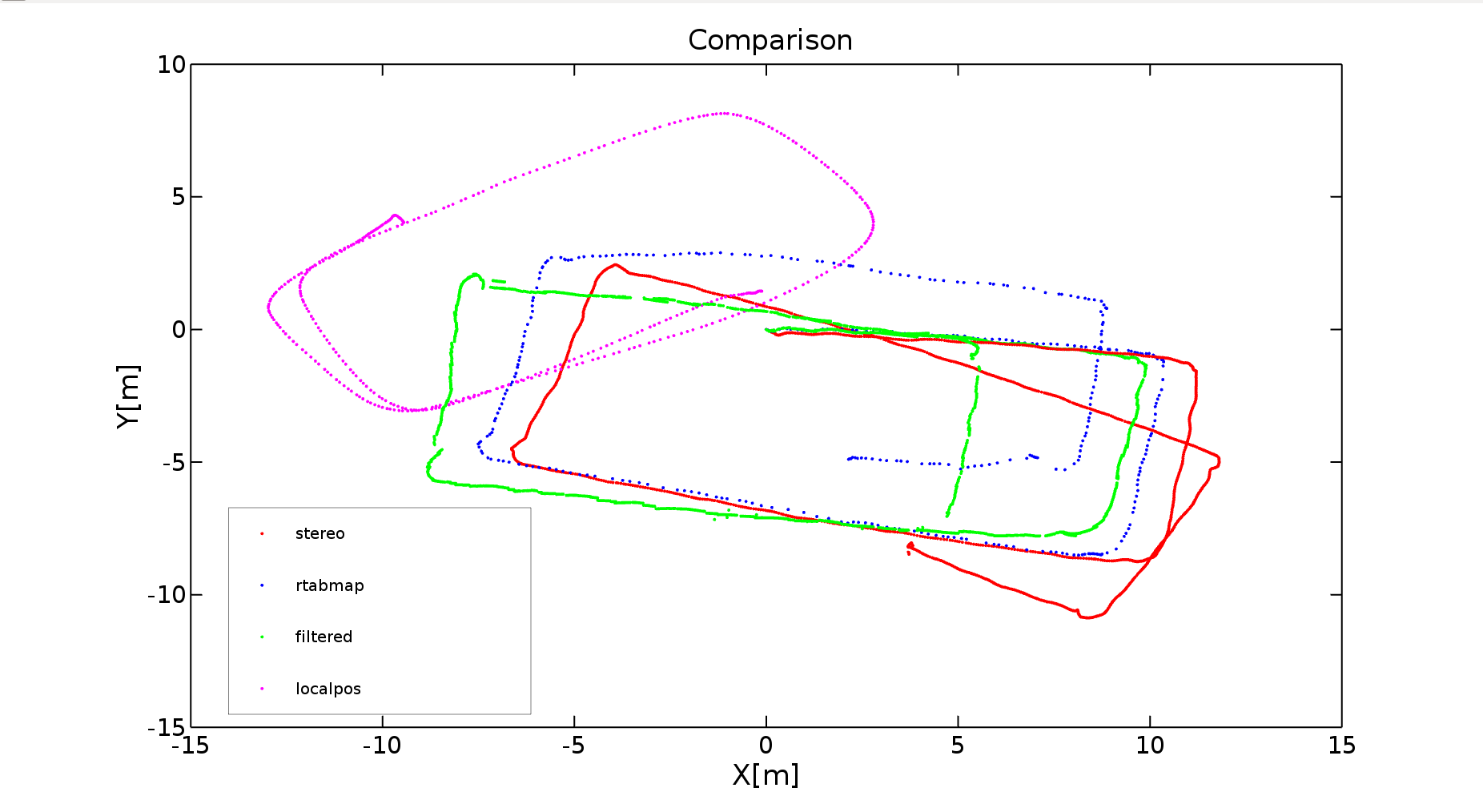
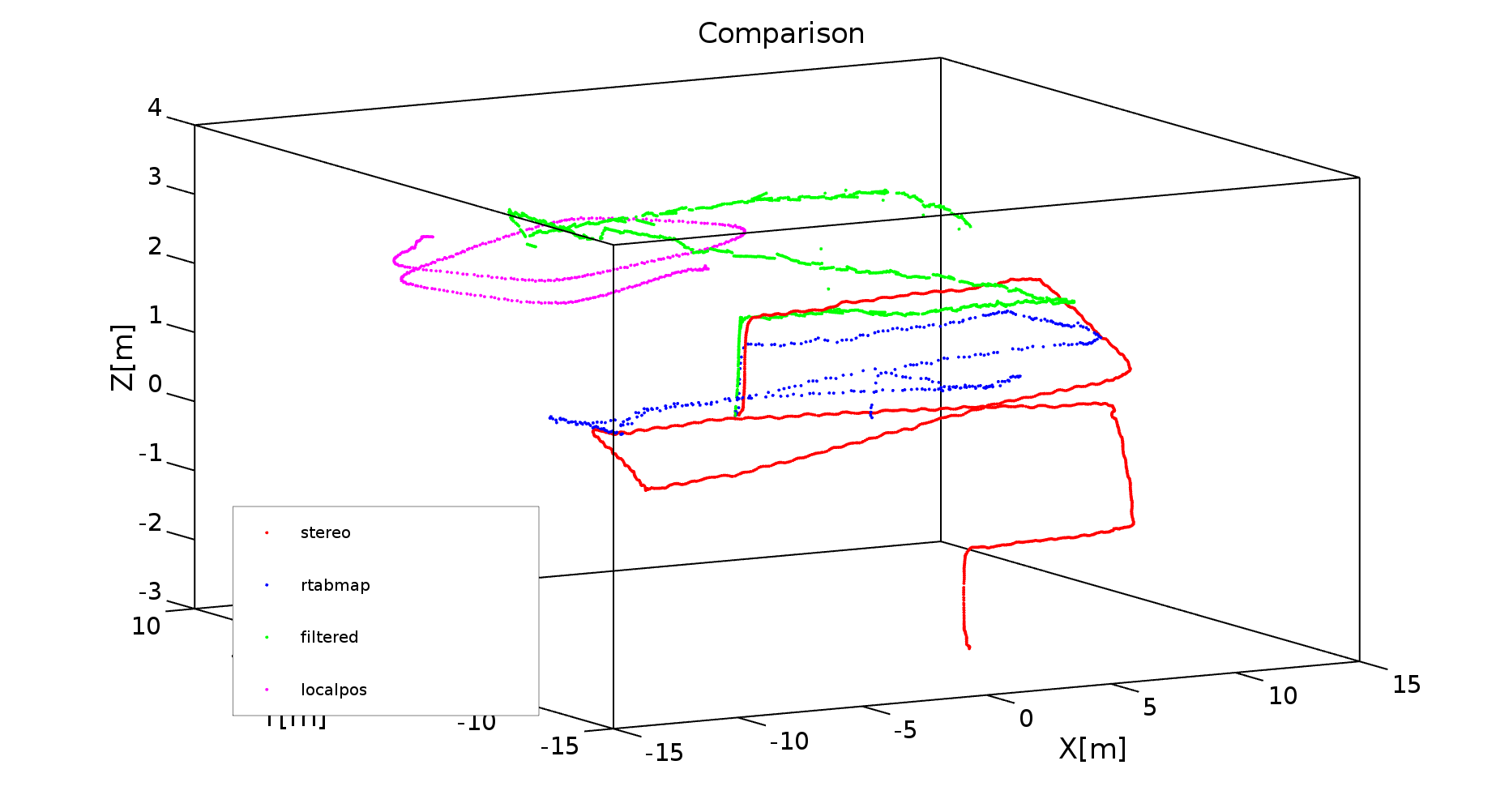
Just wondering why are shifted and rotated?
If you take a look for instance,
Here I show you the in
The white trajectory is
AND.......................... ONE MORE QUESTION :)
I am planning to make a small mission planner using qgroundcontrol, since the drone will be flying, what shall be way to record data for the rtabmap.
I was thinking that in the normal way i record the bag file :)
Could you kindly give me your opinion?
Thank you very much.
URL: http://official-rtab-map-forum.206.s1.nabble.com/Bad-3D-map-robot-localization-sensor-fusion-imu-and-odom-tp5456p5655.html
Hi Mathieu
I have recorded a ros bag that contains the following topics among the camera tf as you suggested :)
/stereo_camera/left/image_raw_color /stereo_camera/left/image_rect_color /stereo_camera/right/image_raw_color /stereo_camera/right/image_rect_color
The bag is:
Bytheway, I have ploted in a single plot the following topics:
1. /stereo_camera/odom
2. /stereo_camera/rtabmap/odom
3. /odometry/filtered
4. /mavros/local_position/odom
As you can see in the following two pictures:
Just wondering why are shifted and rotated?
If you take a look for instance,
/mavros/local_position/odomis completely rotated and shifted also the other ones.
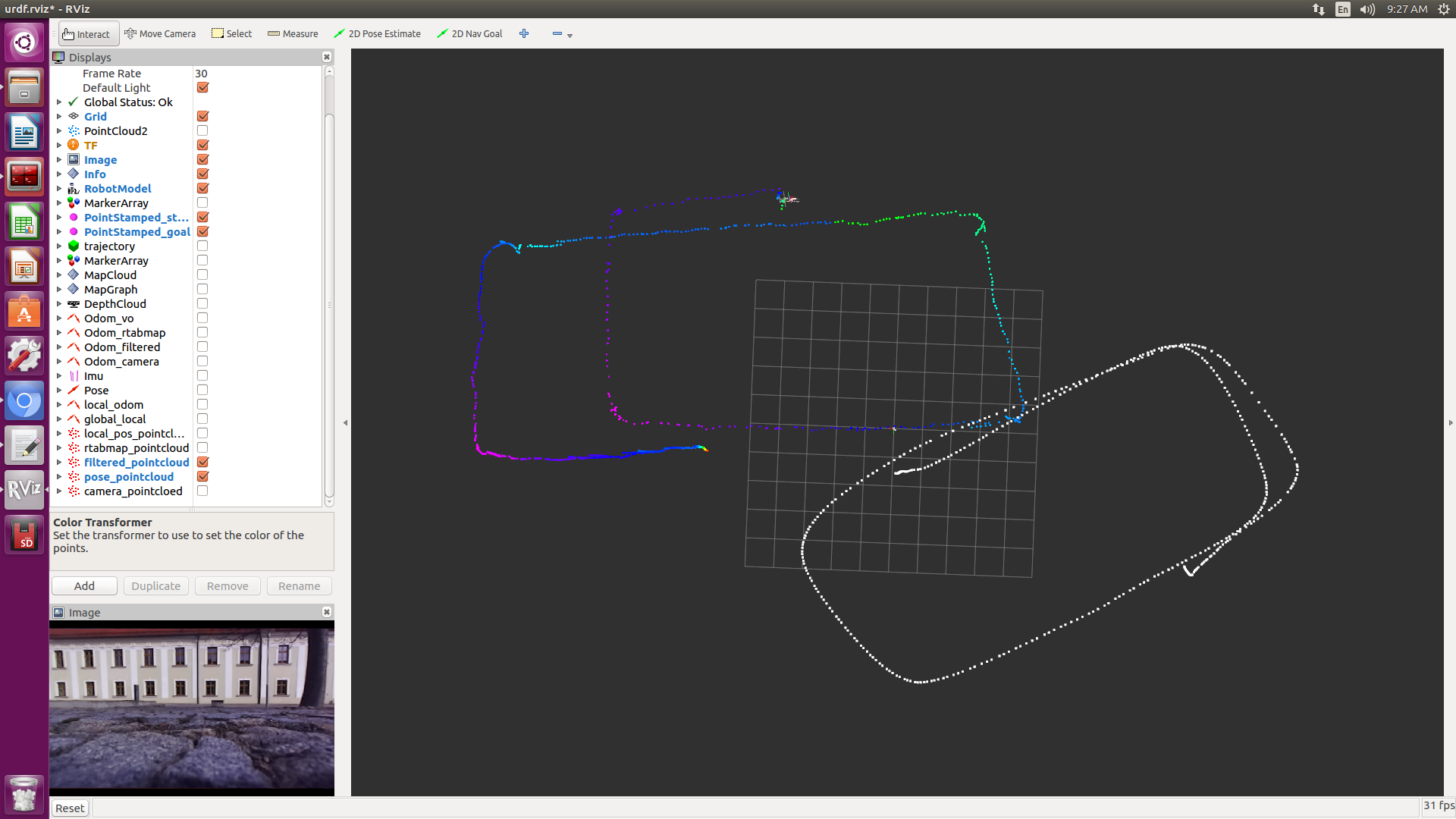
Here I show you the in
RVIZthe comparison between
/mavros/local_position/odomand
/stereo_camera/rtabmap/odom
The white trajectory is
/mavros/local_position/odomwhereas the color one is
/stereo_camera/rtabmap/odom
AND.......................... ONE MORE QUESTION :)
I am planning to make a small mission planner using qgroundcontrol, since the drone will be flying, what shall be way to record data for the rtabmap.
I was thinking that in the normal way i record the bag file :)
Could you kindly give me your opinion?
Thank you very much.
| Free forum by Nabble | Edit this page |