Re: Raytracing using stereo camera for better SLAM and obstacle avoidance.
Posted by johanehr on
URL: http://official-rtab-map-forum.206.s1.nabble.com/Raytracing-using-stereo-camera-for-better-SLAM-and-obstacle-avoidance-tp5632p5658.html
Hi, Mathieu @matlabbe!
RTAB-MAP sure seems to be a great SLAM solution - so far it has been much easier to work with than LeGO-LOAM or ORB-SLAM2, but maybe I'm also getting better at ROS.
A friend and I are working on our Master's thesis together, with the goal of conducting autonomous exploration with a quadcopter. We are using an Intel RealSense D435i RGB-D camera, set to a low resolution of 424 x 240 and a stable 50 fps (when using a fixed exposure time), as well as the integrated IMU. We are launching the whole setup in a modified version of the process described here: https://github.com/intel-ros/realsense/wiki/SLAM-with-D435i , including optimizations from: http://wiki.ros.org/rtabmap_ros/Tutorials/Advanced%20Parameter%20Tuning . We have some problems that may be related to Grid/RayTracing=true...
1. When running RTAB-MAP, we are able to get a decent OctoMap in Rviz (/rtabmap/octomap_full and /rtabmap/octomap_binary) for "occupied voxels", but we can't see anything at all when selecting the choice of seeing only "free voxels". We tried enabling Grid/RayTracing, but this did not seem to help... We have also had instances where the OctoMap does not seem to overlap with the point clouds (as if the loop closures did not get applied to the OctoMap).
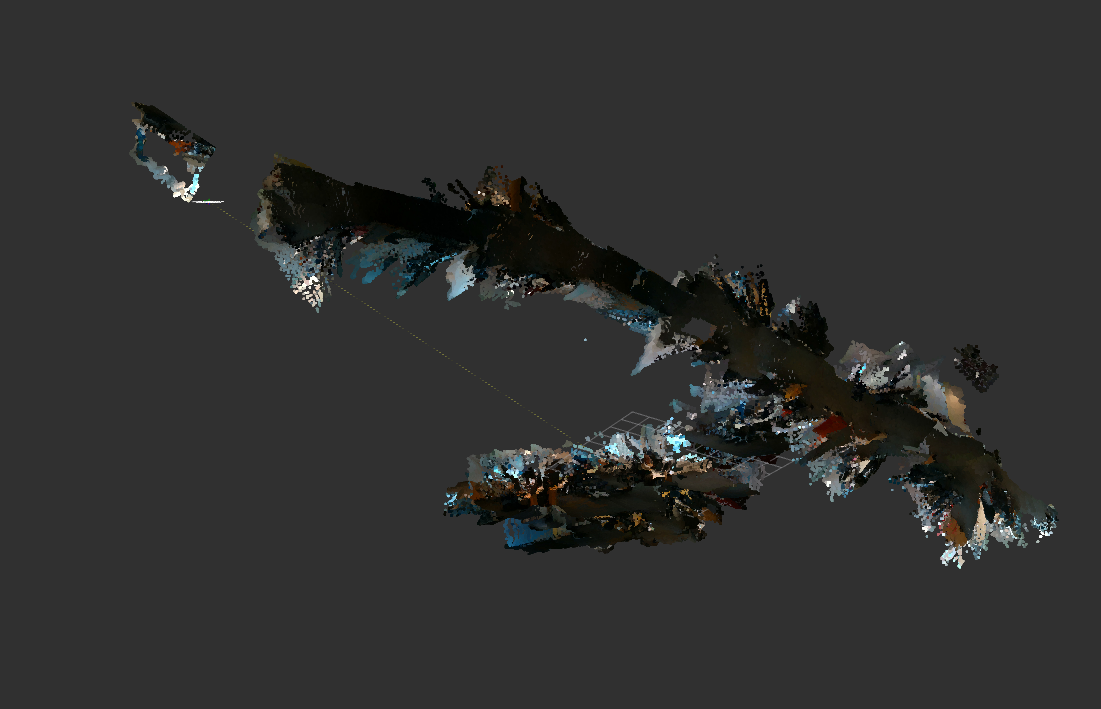
2. We occasionally (when re-playing a ROS bag) get problems with the whole map warping (say, a corridor suddenly heading straight down) or "teleporting" to a new location, where a "new" copy of the area is created. Each "area" seems to be accurate enough (for example, the curve in the corridor in the image is not an artifact, and we do perform loop closures quite consistently normally). We're guessing that this is caused by an issue with the odometry, but are at a loss for how to fix it... Note that this is when just walking around with the sensor, before we introduce any vibrations from drone flight. See the image below for an example:
3. We are currently evaluating whether to offload the RTAB-MAP calculations to a companion computer (initially our Intel i7-6600U laptops, but we have a spare i7-3770K desktop that could be brought in) or whether our onboard Aaeon Up Board (Intel Cherry Trail, 4GB RAM) is powerful enough. We seem to be at risk of maxing out the USB2.0 bus, which our USB WiFi dongle is connected to. Maybe getting a USB 3.0 hub and WiFi dongle would be recommended... Any anecdotal guidance would be appreciated!
We'd be very thankful for some guidance!
URL: http://official-rtab-map-forum.206.s1.nabble.com/Raytracing-using-stereo-camera-for-better-SLAM-and-obstacle-avoidance-tp5632p5658.html
Hi, Mathieu @matlabbe!
RTAB-MAP sure seems to be a great SLAM solution - so far it has been much easier to work with than LeGO-LOAM or ORB-SLAM2, but maybe I'm also getting better at ROS.
A friend and I are working on our Master's thesis together, with the goal of conducting autonomous exploration with a quadcopter. We are using an Intel RealSense D435i RGB-D camera, set to a low resolution of 424 x 240 and a stable 50 fps (when using a fixed exposure time), as well as the integrated IMU. We are launching the whole setup in a modified version of the process described here: https://github.com/intel-ros/realsense/wiki/SLAM-with-D435i , including optimizations from: http://wiki.ros.org/rtabmap_ros/Tutorials/Advanced%20Parameter%20Tuning . We have some problems that may be related to Grid/RayTracing=true...
1. When running RTAB-MAP, we are able to get a decent OctoMap in Rviz (/rtabmap/octomap_full and /rtabmap/octomap_binary) for "occupied voxels", but we can't see anything at all when selecting the choice of seeing only "free voxels". We tried enabling Grid/RayTracing, but this did not seem to help... We have also had instances where the OctoMap does not seem to overlap with the point clouds (as if the loop closures did not get applied to the OctoMap).
2. We occasionally (when re-playing a ROS bag) get problems with the whole map warping (say, a corridor suddenly heading straight down) or "teleporting" to a new location, where a "new" copy of the area is created. Each "area" seems to be accurate enough (for example, the curve in the corridor in the image is not an artifact, and we do perform loop closures quite consistently normally). We're guessing that this is caused by an issue with the odometry, but are at a loss for how to fix it... Note that this is when just walking around with the sensor, before we introduce any vibrations from drone flight. See the image below for an example:
3. We are currently evaluating whether to offload the RTAB-MAP calculations to a companion computer (initially our Intel i7-6600U laptops, but we have a spare i7-3770K desktop that could be brought in) or whether our onboard Aaeon Up Board (Intel Cherry Trail, 4GB RAM) is powerful enough. We seem to be at risk of maxing out the USB2.0 bus, which our USB WiFi dongle is connected to. Maybe getting a USB 3.0 hub and WiFi dongle would be recommended... Any anecdotal guidance would be appreciated!
We'd be very thankful for some guidance!
| Free forum by Nabble | Edit this page |