Re: Raytracing using stereo camera for better SLAM and obstacle avoidance.
Posted by matlabbe on
URL: http://official-rtab-map-forum.206.s1.nabble.com/Raytracing-using-stereo-camera-for-better-SLAM-and-obstacle-avoidance-tp5632p5683.html
Hi,
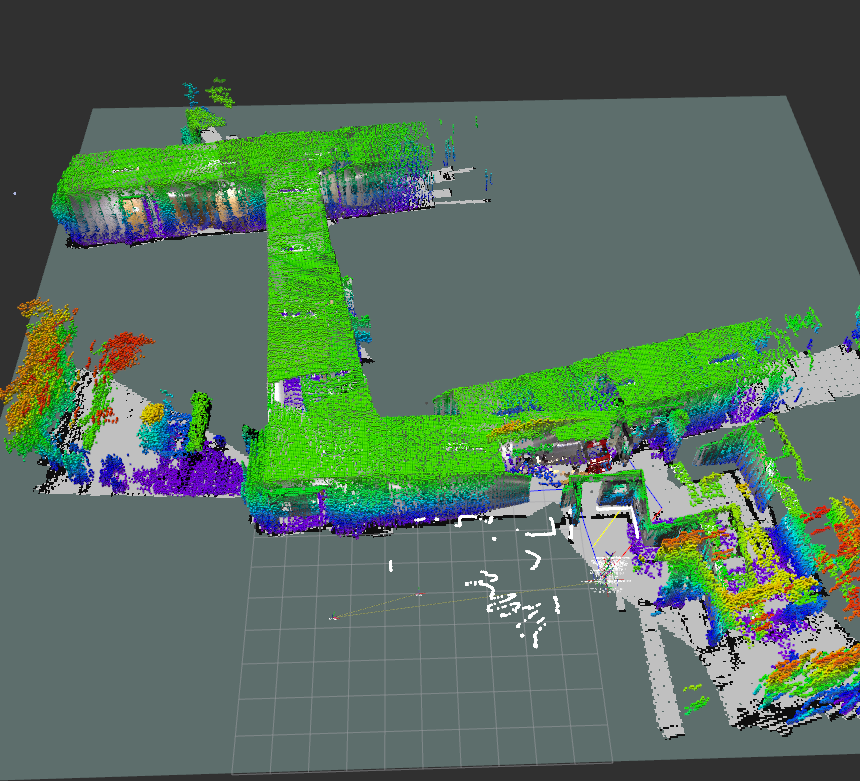
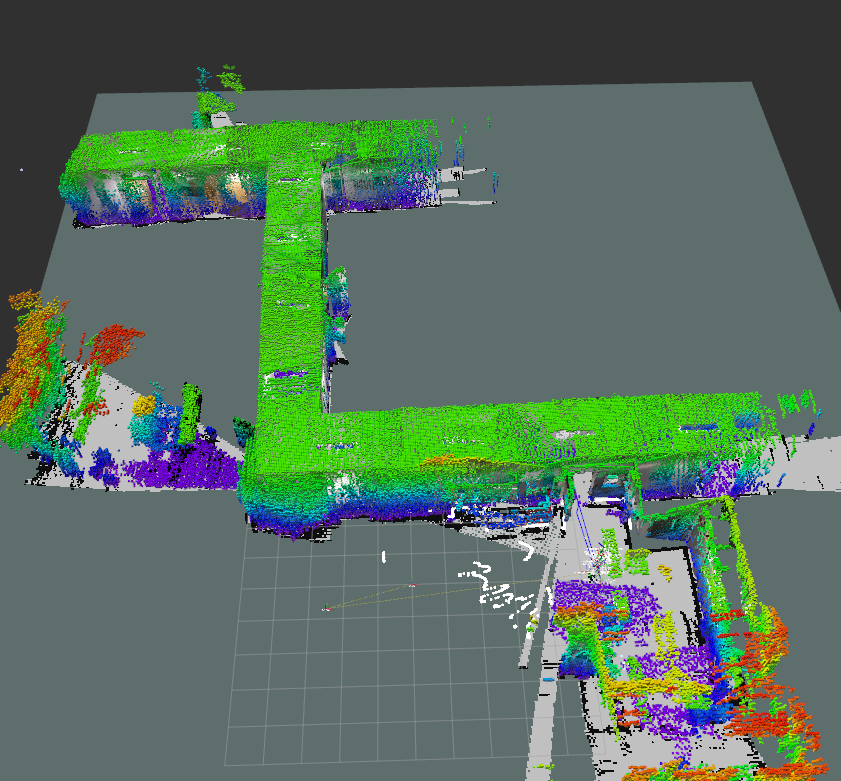
1) Which rtabmap version are you using? The free voxels does nothing here too with the ColorOccupancyGrid plugin. They should be in the topic though. The empty space can be also shown with /rtabmap/octomap_empty_space topic for convenience. But yes, Grid/RayTracing should be true to get empty cells. The Octomap published by rtabmap node should overlap the point cloud and be corrected on loop closure. Just tested on Demo Robot Mapping example by changing in the launch the parameter Grid/FromDepth to true. Here the octomap without and with loop closures:
2) Can you share the database with this issue? Maybe there is a wrong loop closure.
3) If you do odometry onboard, you don't need to send at 50 Hz the data out of the drone. RTAB-Map by default updates only at 1 Hz. Throttling the images that should be sent over wifi. There is an example here.
cheers,
Mathieu
URL: http://official-rtab-map-forum.206.s1.nabble.com/Raytracing-using-stereo-camera-for-better-SLAM-and-obstacle-avoidance-tp5632p5683.html
Hi,
1) Which rtabmap version are you using? The free voxels does nothing here too with the ColorOccupancyGrid plugin. They should be in the topic though. The empty space can be also shown with /rtabmap/octomap_empty_space topic for convenience. But yes, Grid/RayTracing should be true to get empty cells. The Octomap published by rtabmap node should overlap the point cloud and be corrected on loop closure. Just tested on Demo Robot Mapping example by changing in the launch the parameter Grid/FromDepth to true. Here the octomap without and with loop closures:
2) Can you share the database with this issue? Maybe there is a wrong loop closure.
3) If you do odometry onboard, you don't need to send at 50 Hz the data out of the drone. RTAB-Map by default updates only at 1 Hz. Throttling the images that should be sent over wifi. There is an example here.
cheers,
Mathieu
| Free forum by Nabble | Edit this page |