Localization error for robot with kinectv2 and move_base package
Posted by manojvenkatarao on
URL: http://official-rtab-map-forum.206.s1.nabble.com/Localization-error-for-robot-with-kinectv2-and-move-base-package-tp5711.html
Hello People,
I am trying autonomous navigation for a real robot using Kinect camera.
I am using rtabmap for mapping and localization.
move_base is used for navigation to specified goal.
map_server is used to convert my map in to "/mapData" format acceptable by move_base package.
steps followed:
1.launch robot state publisher,camera node, joystick node (for robot). - initialized my robot transforms,camera point clouds.
2.launch rtabmap.launch in localization mode with rviz:=true (for visualizatoin). (i have previously mapped data as .db file)
3.launch map_server which publishes my map in 2d format (grid map)
4.launch move_base for path planning.
5. I set goal in rviz.
move_base package is not getting proper localization position.
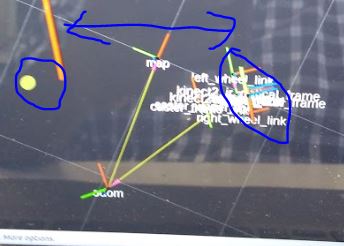
I can see error in the estimated localization pose in rviz.
Due to the error my move_base package is unable to navigate the bot. can anyone help me to solve my localization error.
Thank you.
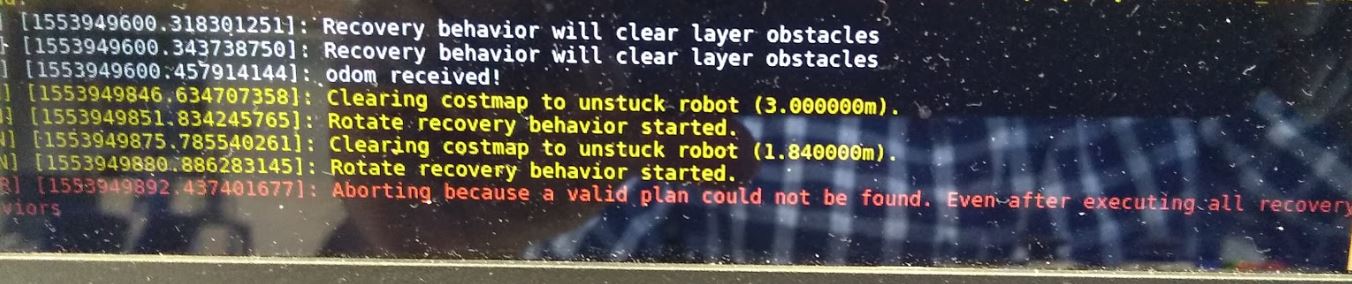
error in move_base package

recovery feature of move_base unsuccessful
localization error
URL: http://official-rtab-map-forum.206.s1.nabble.com/Localization-error-for-robot-with-kinectv2-and-move-base-package-tp5711.html
Hello People,
I am trying autonomous navigation for a real robot using Kinect camera.
I am using rtabmap for mapping and localization.
move_base is used for navigation to specified goal.
map_server is used to convert my map in to "/mapData" format acceptable by move_base package.
steps followed:
1.launch robot state publisher,camera node, joystick node (for robot). - initialized my robot transforms,camera point clouds.
2.launch rtabmap.launch in localization mode with rviz:=true (for visualizatoin). (i have previously mapped data as .db file)
3.launch map_server which publishes my map in 2d format (grid map)
4.launch move_base for path planning.
5. I set goal in rviz.
move_base package is not getting proper localization position.
I can see error in the estimated localization pose in rviz.
Due to the error my move_base package is unable to navigate the bot. can anyone help me to solve my localization error.
Thank you.
error in move_base package
recovery feature of move_base unsuccessful
localization error
| Free forum by Nabble | Edit this page |