Re: RTAB SLAM using Wheel Encoder+imu+2d rotating Lidar
Posted by tsdk on
URL: http://official-rtab-map-forum.206.s1.nabble.com/RTAB-SLAM-using-Wheel-Encoder-imu-2d-rotating-Lidar-tp5741p5832.html
Hi,
Yeah, in a small loop using only odometry and 3d Lidar is sufficient to do loop closure.
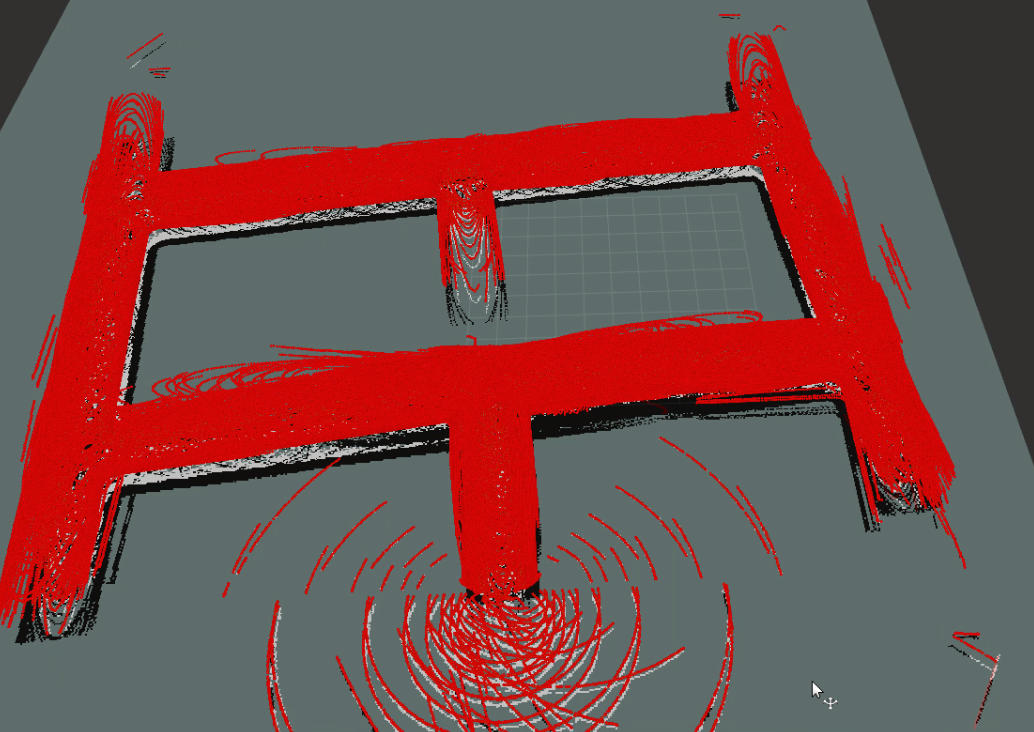
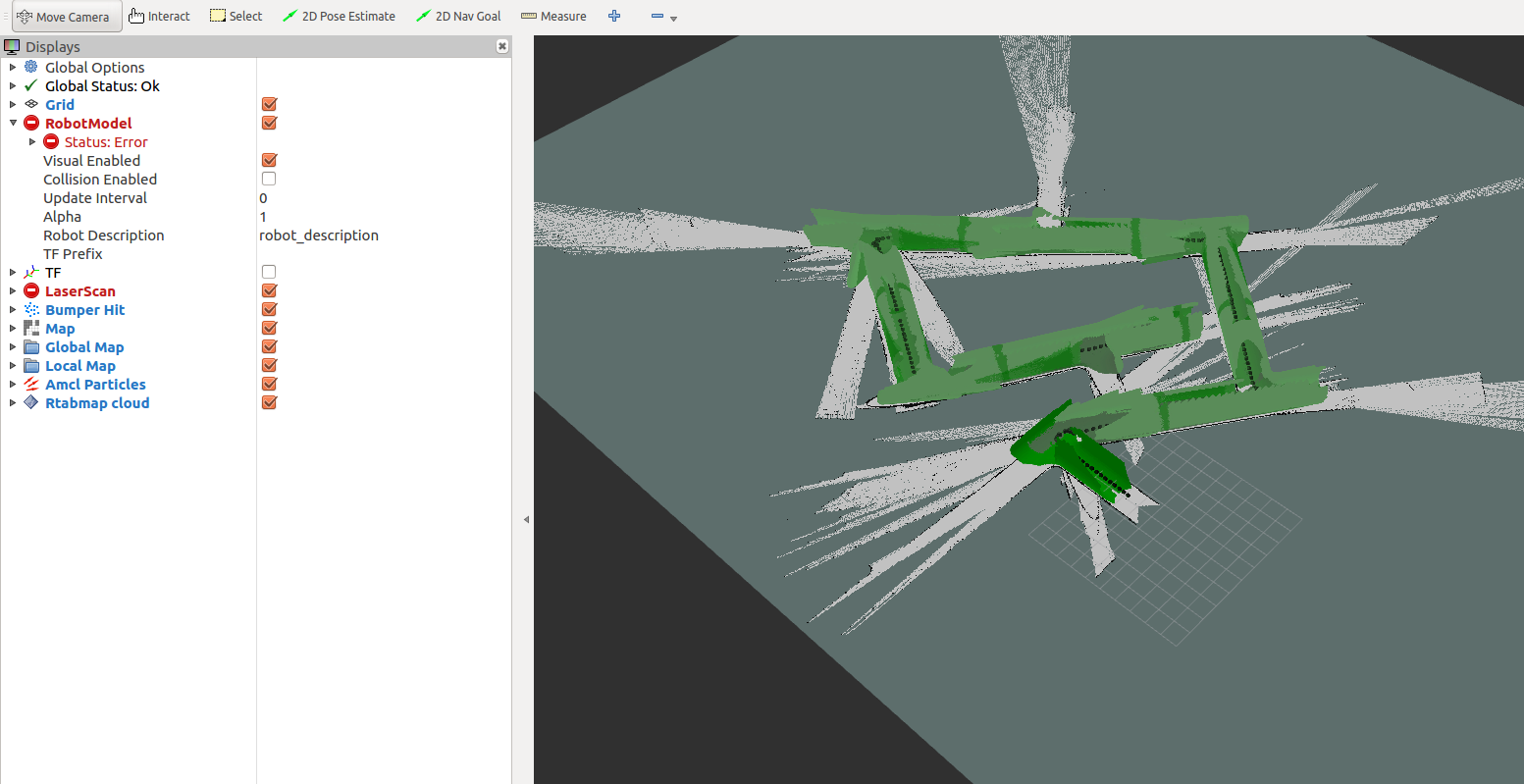
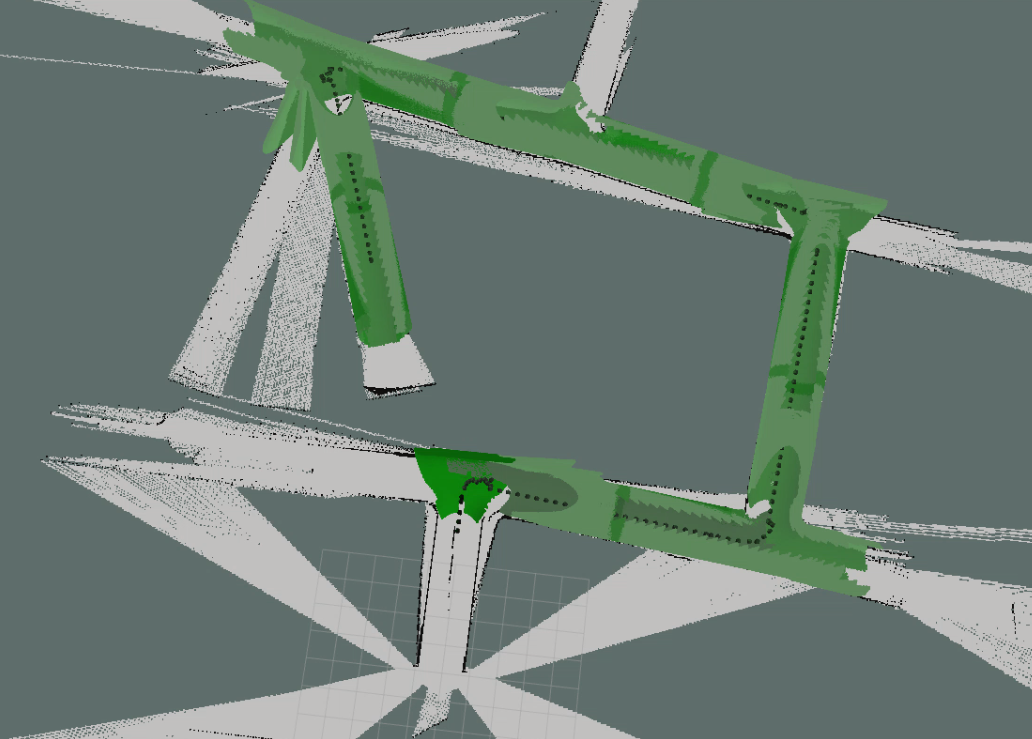
However, I tried with a Kinect, 2d Lidar and Odometry for the same map. I run the same bag each time and every time I get different results but it fails to close the loop
Is there any specific reason for this? Here is my launch file:
my_rtab.launch
Moreover, I think if I tune some parameters even this can work for me.
URL: http://official-rtab-map-forum.206.s1.nabble.com/RTAB-SLAM-using-Wheel-Encoder-imu-2d-rotating-Lidar-tp5741p5832.html
Hi,
Yeah, in a small loop using only odometry and 3d Lidar is sufficient to do loop closure.
However, I tried with a Kinect, 2d Lidar and Odometry for the same map. I run the same bag each time and every time I get different results but it fails to close the loop
Is there any specific reason for this? Here is my launch file:
my_rtab.launch
Moreover, I think if I tune some parameters even this can work for me.
| Free forum by Nabble | Edit this page |