RTAB-Map on Jetson Nano
Posted by MakeMeMaps_JetsonNano on
URL: http://official-rtab-map-forum.206.s1.nabble.com/RTAB-Map-on-Jetson-Nano-tp5875.html
Hello first time here,
I am trying to integrate rtab-map on a jetson Nano
I am using a Kinect v1
when i try to run the handheld version i lose odometry very easily and get maps like this with random points in front of the camera.
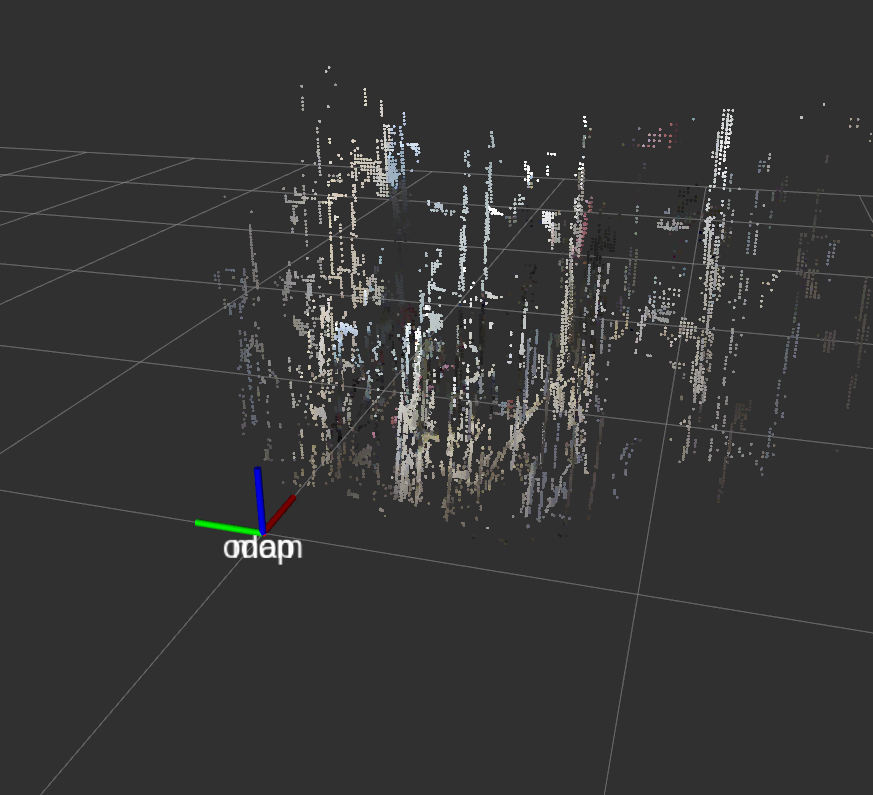
What is your opinion on running rtab-map on the Nano with a kinect, should i consider buying a ZED camera that people succesfully used for 3d mapping with rtab
I also have a cheap 100 bucks 2D lidar (ydlidar x4) that i can get odometry with,
I want to combine visual odometry + lidar odometry + imu + wheel_encoders with the robot localize package.
How you suggest to accomplish that (e.g use visual and lidar (ICP) odometry from rtab map and fed them to the robot localize) or
(visual odometry from rtabmap) + external lidar odometry
or with a Zed camera external visual odometry + lidar odometry -> robot_localize -> rtabmap
I hope i am not vague
Thanks
URL: http://official-rtab-map-forum.206.s1.nabble.com/RTAB-Map-on-Jetson-Nano-tp5875.html
Hello first time here,
I am trying to integrate rtab-map on a jetson Nano
I am using a Kinect v1
when i try to run the handheld version i lose odometry very easily and get maps like this with random points in front of the camera.
What is your opinion on running rtab-map on the Nano with a kinect, should i consider buying a ZED camera that people succesfully used for 3d mapping with rtab
I also have a cheap 100 bucks 2D lidar (ydlidar x4) that i can get odometry with,
I want to combine visual odometry + lidar odometry + imu + wheel_encoders with the robot localize package.
How you suggest to accomplish that (e.g use visual and lidar (ICP) odometry from rtab map and fed them to the robot localize) or
(visual odometry from rtabmap) + external lidar odometry
or with a Zed camera external visual odometry + lidar odometry -> robot_localize -> rtabmap
I hope i am not vague
Thanks
| Free forum by Nabble | Edit this page |