RTAB-Map occupancy grid map error in Turtlebot3 Gazebo
Posted by yclo3 on
URL: http://official-rtab-map-forum.206.s1.nabble.com/RTAB-Map-occupancy-grid-map-error-in-Turtlebot3-Gazebo-tp5886.html
Hi,
I am new and testing RTAB-Map with Turtlebot3 in Gazebo, i.e., the package turtlebot3_gazebo. It's highly likely that at the beginning OccupancyGrid.cpp reports extreme poses and the grid map is not generated but recovered after a small move. If the grid map is not recovered after moves the process will die. The error messages and my launch file are at the bottom.
The RGB-D part just works fine and produces 3D point clouds without problems even if the grid map is getting stuck. The launch file at the bottom only subscribes to scan topic. The error occurs no matter whether it subscribes to RGB-D topics.
The version of rtabmap and rtabmap_ros are up-to-date.
Here are some observations:
1. This error is not observed on real Turtlebot3.
2. This error is not shown if neither rviz nor rtabmapviz is launched. For rtabmapviz, this error occurs on the request to graphview and Rtabmap will be paused.
3. It occurs randomly. At the beginning the grid map may be shown without problems or the process may die instantly.
4. It acts like being affected by non-initialized variables. Once it died, simply reopen the same Gazebo launch file and rtabmap process would repeat the dead status. But opening another Gazebo launch file can refresh it. e.g, died in turtlebot3_house.launch and be refreshed with turtlebot3_world.launch.
5. The status may go from good to bad during the mapping process and die in worst case.
6. When the grid map is recovered after moves, the scans from locations while in bad status is available on the recovered grid map.
7. The lidar spec seems doesn't matter. The error remains with better lidar range, rate, resolution.
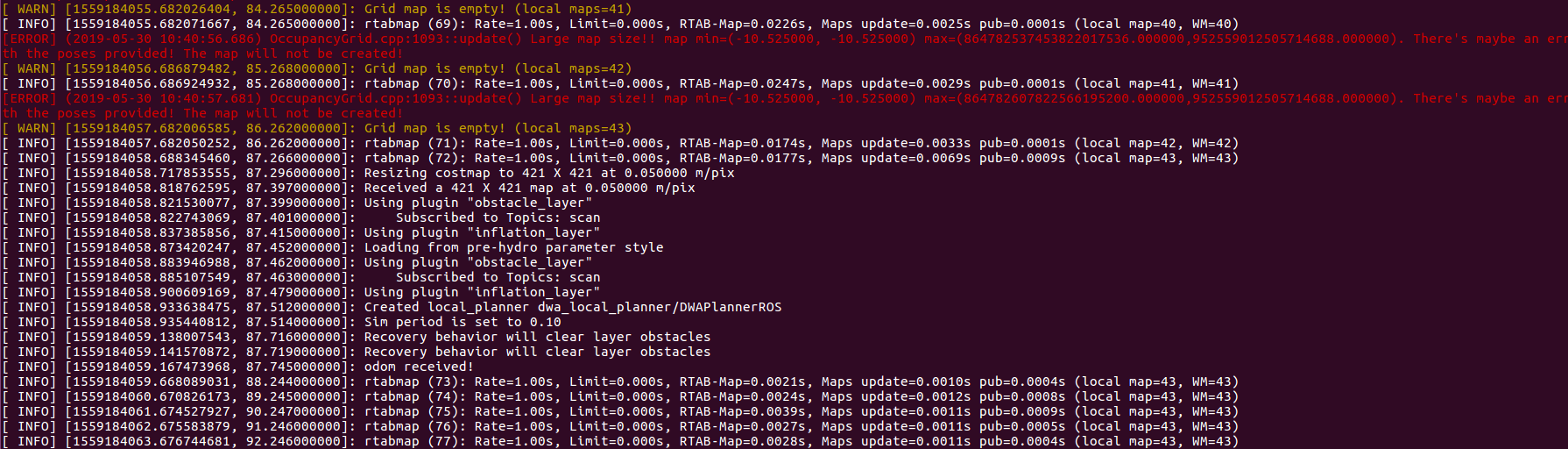
Error message:
[ INFO] [1559125683.728586934, 12.243000000]: rtabmap 0.19.2 started...
[ INFO] [1559125683.812297465, 12.327000000]: Loading from pre-hydro parameter style
[ INFO] [1559125683.827900775, 12.342000000]: Using plugin "static_layer"
[ INFO] [1559125683.834373944, 12.349000000]: Requesting the map...
[ INFO] [1559125683.886420927, 12.401000000]: rtabmap (1): Rate=1.00s, Limit=0.000s, RTAB-Map=0.0020s, Maps update=0.0059s pub=0.0002s (local map=1, WM=1)
[ERROR] (2019-05-29 18:28:05.084) OccupancyGrid.cpp:1093::update() Large map size!! map min=(-10.525000, -10.525000) max=(15393669209995186527723847680.000000,16772793129819273747759104.000000). There's maybe an error with the poses provided! The map will not be created!
[ WARN] [1559125685.084768042, 13.597000000]: Grid map is empty! (local maps=2)
[ INFO] [1559125685.084814301, 13.597000000]: rtabmap (2): Rate=1.00s, Limit=0.000s, RTAB-Map=0.0021s, Maps update=0.0029s pub=0.0001s (local map=1, WM=1)
[ERROR] (2019-05-29 18:28:06.286) OccupancyGrid.cpp:1093::update() Large map size!! map min=(-10.525000, -10.525000) max=(15393669209995186527723847680.000000,16772793129819273747759104.000000). There's maybe an error with the poses provided! The map will not be created!
[ WARN] [1559125686.287078498, 14.796000000]: Grid map is empty! (local maps=2)
[ INFO] [1559125686.287131429, 14.796000000]: rtabmap (3): Rate=1.00s, Limit=0.000s, RTAB-Map=0.0023s, Maps update=0.0013s pub=0.0001s (local map=1, WM=1)
[ERROR] (2019-05-29 18:28:07.289) OccupancyGrid.cpp:1093::update() Large map size!! map min=(-10.525000, -10.525000) max=(15393669209995186527723847680.000000,16772793129819273747759104.000000). There's maybe an error with the poses provided! The map will not be created!
Recovered and grid map shown:
Process died: (This case is not easy to be reproduced, this screenshot is taken in localization mode. It is also crashed by extreme poses)

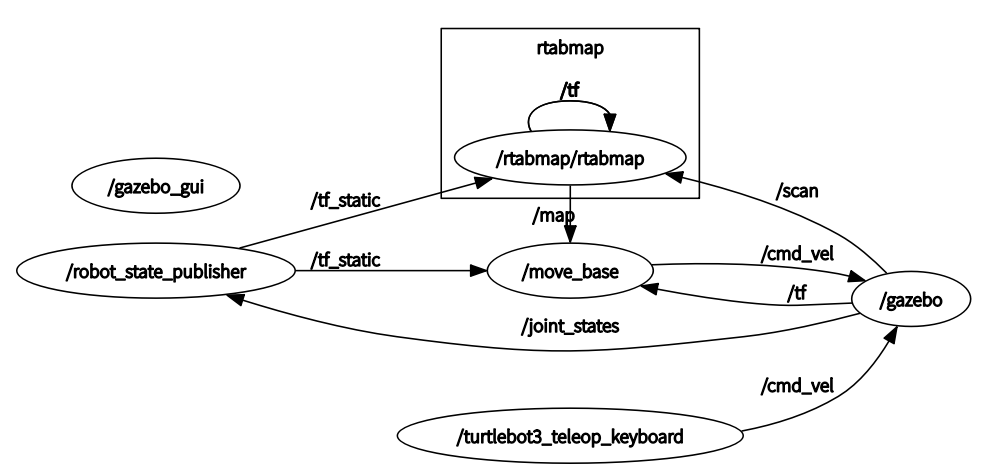
rqt_graph:
My launch file modified from demo_turtlebot_mapping.launch (simulation:=true model:='waffle' in my runs, model doesn't matter though):
demo_turtlebot3_mapping_L.launch
Sincerely,
YC
URL: http://official-rtab-map-forum.206.s1.nabble.com/RTAB-Map-occupancy-grid-map-error-in-Turtlebot3-Gazebo-tp5886.html
Hi,
I am new and testing RTAB-Map with Turtlebot3 in Gazebo, i.e., the package turtlebot3_gazebo. It's highly likely that at the beginning OccupancyGrid.cpp reports extreme poses and the grid map is not generated but recovered after a small move. If the grid map is not recovered after moves the process will die. The error messages and my launch file are at the bottom.
The RGB-D part just works fine and produces 3D point clouds without problems even if the grid map is getting stuck. The launch file at the bottom only subscribes to scan topic. The error occurs no matter whether it subscribes to RGB-D topics.
The version of rtabmap and rtabmap_ros are up-to-date.
Here are some observations:
1. This error is not observed on real Turtlebot3.
2. This error is not shown if neither rviz nor rtabmapviz is launched. For rtabmapviz, this error occurs on the request to graphview and Rtabmap will be paused.
3. It occurs randomly. At the beginning the grid map may be shown without problems or the process may die instantly.
4. It acts like being affected by non-initialized variables. Once it died, simply reopen the same Gazebo launch file and rtabmap process would repeat the dead status. But opening another Gazebo launch file can refresh it. e.g, died in turtlebot3_house.launch and be refreshed with turtlebot3_world.launch.
5. The status may go from good to bad during the mapping process and die in worst case.
6. When the grid map is recovered after moves, the scans from locations while in bad status is available on the recovered grid map.
7. The lidar spec seems doesn't matter. The error remains with better lidar range, rate, resolution.
Error message:
[ INFO] [1559125683.728586934, 12.243000000]: rtabmap 0.19.2 started...
[ INFO] [1559125683.812297465, 12.327000000]: Loading from pre-hydro parameter style
[ INFO] [1559125683.827900775, 12.342000000]: Using plugin "static_layer"
[ INFO] [1559125683.834373944, 12.349000000]: Requesting the map...
[ INFO] [1559125683.886420927, 12.401000000]: rtabmap (1): Rate=1.00s, Limit=0.000s, RTAB-Map=0.0020s, Maps update=0.0059s pub=0.0002s (local map=1, WM=1)
[ERROR] (2019-05-29 18:28:05.084) OccupancyGrid.cpp:1093::update() Large map size!! map min=(-10.525000, -10.525000) max=(15393669209995186527723847680.000000,16772793129819273747759104.000000). There's maybe an error with the poses provided! The map will not be created!
[ WARN] [1559125685.084768042, 13.597000000]: Grid map is empty! (local maps=2)
[ INFO] [1559125685.084814301, 13.597000000]: rtabmap (2): Rate=1.00s, Limit=0.000s, RTAB-Map=0.0021s, Maps update=0.0029s pub=0.0001s (local map=1, WM=1)
[ERROR] (2019-05-29 18:28:06.286) OccupancyGrid.cpp:1093::update() Large map size!! map min=(-10.525000, -10.525000) max=(15393669209995186527723847680.000000,16772793129819273747759104.000000). There's maybe an error with the poses provided! The map will not be created!
[ WARN] [1559125686.287078498, 14.796000000]: Grid map is empty! (local maps=2)
[ INFO] [1559125686.287131429, 14.796000000]: rtabmap (3): Rate=1.00s, Limit=0.000s, RTAB-Map=0.0023s, Maps update=0.0013s pub=0.0001s (local map=1, WM=1)
[ERROR] (2019-05-29 18:28:07.289) OccupancyGrid.cpp:1093::update() Large map size!! map min=(-10.525000, -10.525000) max=(15393669209995186527723847680.000000,16772793129819273747759104.000000). There's maybe an error with the poses provided! The map will not be created!
Recovered and grid map shown:
Process died: (This case is not easy to be reproduced, this screenshot is taken in localization mode. It is also crashed by extreme poses)
rqt_graph:
My launch file modified from demo_turtlebot_mapping.launch (simulation:=true model:='waffle' in my runs, model doesn't matter though):
demo_turtlebot3_mapping_L.launch
Sincerely,
YC
| Free forum by Nabble | Edit this page |