Re: RTAB-Map occupancy grid map error in Turtlebot3 Gazebo
Posted by matlabbe on
URL: http://official-rtab-map-forum.206.s1.nabble.com/RTAB-Map-occupancy-grid-map-error-in-Turtlebot3-Gazebo-tp5886p5915.html
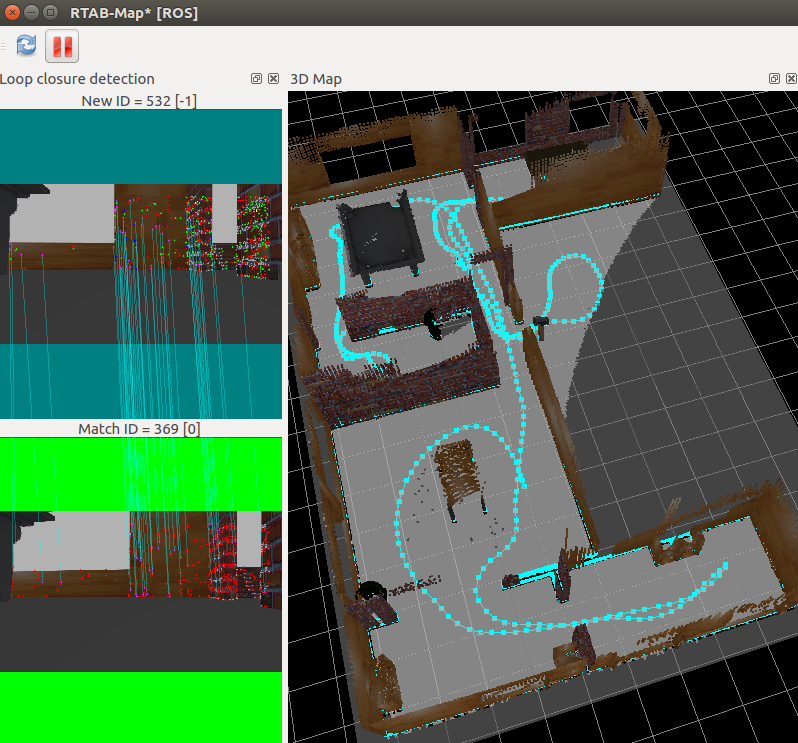
Hi, normally the inf values in the ranges should be discarded. I tried the turtlebot3 gazebo example and I didn't have problems:
URL: http://official-rtab-map-forum.206.s1.nabble.com/RTAB-Map-occupancy-grid-map-error-in-Turtlebot3-Gazebo-tp5886p5915.html
Hi, normally the inf values in the ranges should be discarded. I tried the turtlebot3 gazebo example and I didn't have problems:
$ export TURTLEBOT3_MODEL=waffle
$ roslaunch turtlebot3_gazebo turtlebot3_house.launch
$ roslaunch turtlebot3_teleop turtlebot3_teleop_key.launch
$ roslaunch turtlebot3_bringup turtlebot3_remote.launch model:=waffle
$ roslaunch rtabmap_ros rtabmap.launch \
args:="-d \
--RGBD/NeighborLinkRefining true \
--Reg/Force3DoF true \
--Reg/Strategy 1 \
--Mem/LaserScanVoxelSize 0.05 \
--Icp/MaxCorrespondenceDistance 0.1 \
--Mem/ImagePreDecimation 3 \
--Mem/ImagePostDecimation 2" \
visual_odometry:=false \
odom_frame_id:=odom \
subscribe_scan:=true \
scan_topic:="/scan" \
rgbd_sync:=true \
approx_rgbd_sync:=false \
rgb_topic:=/camera/rgb/image_raw \
camera_info_topic:=/camera/rgb/camera_info \
depth_topic:=/camera/depth/image_raw \
frame_id:=base_footprint
| Free forum by Nabble | Edit this page |