Re: misalignment from tango multi session
Posted by matlabbe on
URL: http://official-rtab-map-forum.206.s1.nabble.com/misalignment-from-tango-multi-session-tp5046p5969.html
Hi,
It seems to be a g2o library version problem. Did you install also g2o from source (while the binaries are still installed)? The wrong g2o library (different than one used to build rtabmap) may be used on runtime.
You could log which libraries ldd is finding:
In your case however, you can safely set Vis/BundleAdjustment to 0 as transforms are refined by lidar's scans.
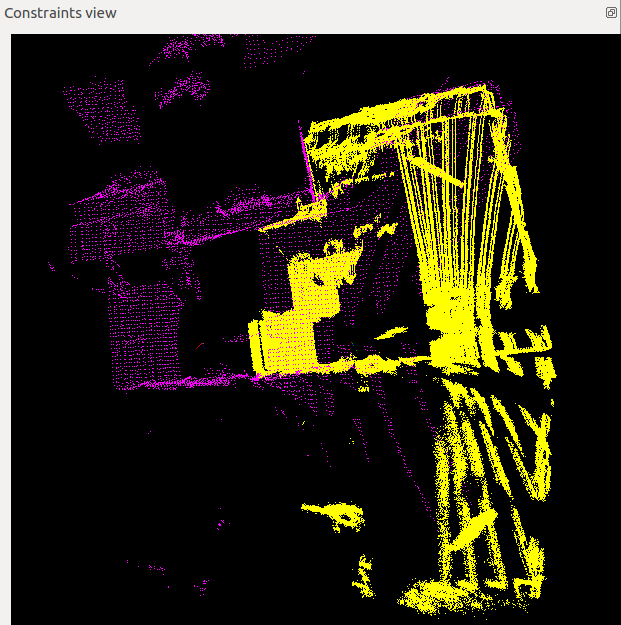
In the first database, it happened two times that there was a very large point cloud saved in the database, like the voxel filtering done in Memory didn't work (Mem/LaserScanVoxelSize=0.1), causing a 10 sec lag before processing the next cloud. Here two consecutive clouds added to database, the yellow one is wrong, as it seems not downsampled. Not sure what caused the problem, a rosbag would be required to debug more.
For the second database, I can see that this configuration is difficult for scan matching in some situations where the lidar only sees the ceiling, ground and two parallel walls. Scan matching cannot know the lidar is moving in this case (it is missing constraints in x axis below), creating a drift.
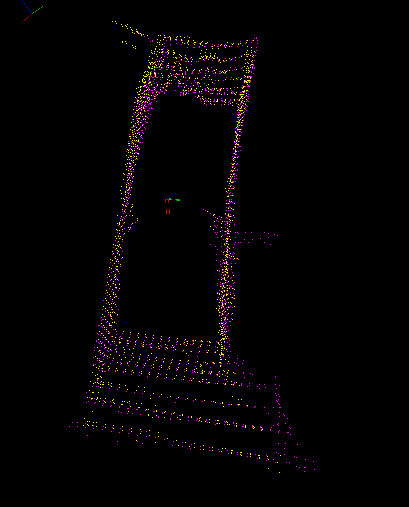
If the lidar could be tilted less, to see more forward and behind, it could add those missing contraints. You could also decrease "Icp/PMOutlierRatio" to 0.3 or 0.4 for icp_odometry. For more debugging about odometry, a rosbag would be required (with a least lidar point cloud, IMU and TF between those sensors, images not required to debug odometry).
cheers,
Mathieu
URL: http://official-rtab-map-forum.206.s1.nabble.com/misalignment-from-tango-multi-session-tp5046p5969.html
Hi,
It seems to be a g2o library version problem. Did you install also g2o from source (while the binaries are still installed)? The wrong g2o library (different than one used to build rtabmap) may be used on runtime.
You could log which libraries ldd is finding:
$ ldd /home/sdeboffle/Bureau/Quanergy_launch/catkin_ws/devel/lib/rtabmap_ros/rtabmap
In your case however, you can safely set Vis/BundleAdjustment to 0 as transforms are refined by lidar's scans.
In the first database, it happened two times that there was a very large point cloud saved in the database, like the voxel filtering done in Memory didn't work (Mem/LaserScanVoxelSize=0.1), causing a 10 sec lag before processing the next cloud. Here two consecutive clouds added to database, the yellow one is wrong, as it seems not downsampled. Not sure what caused the problem, a rosbag would be required to debug more.
For the second database, I can see that this configuration is difficult for scan matching in some situations where the lidar only sees the ceiling, ground and two parallel walls. Scan matching cannot know the lidar is moving in this case (it is missing constraints in x axis below), creating a drift.
If the lidar could be tilted less, to see more forward and behind, it could add those missing contraints. You could also decrease "Icp/PMOutlierRatio" to 0.3 or 0.4 for icp_odometry. For more debugging about odometry, a rosbag would be required (with a least lidar point cloud, IMU and TF between those sensors, images not required to debug odometry).
cheers,
Mathieu
| Free forum by Nabble | Edit this page |