Re: rtabmap_ros outdoor 3D mapping
Posted by matlabbe on
URL: http://official-rtab-map-forum.206.s1.nabble.com/rtabmap-ros-outdoor-3D-mapping-tp6104p6134.html
Hi,
If you are using rtabmap.launch, set imu_topic argument to topic of your IMU. It can be roughly synchronized with the zed. If rtabmap node is used directly, add the remap for "imu" topic. Make sure TF between imu and the zed is accurate (at least for orientation). Then to use the gravity constraints in the graph, add parameter "--Optimizer/GravitySigma 0.3". On loop closures, it will optimize the graph to be aligned with gravity.
To run a database again like a rosbag:
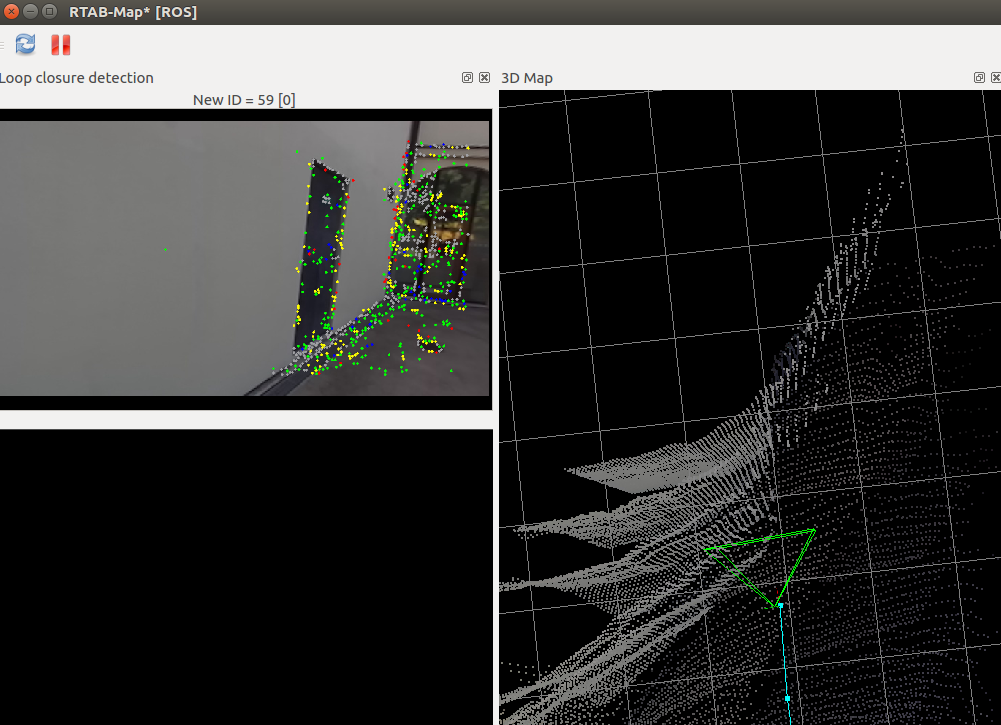
The not aligned wall is a depth computation issue, the zed algorithm interpolates a lot on featureless surfaces. I think the pose is good, but the wall is very distorted. There are maybe parameters on zed side to avoid creating depth on featureless surfaces like that.
What kind of problems is causing the sun light? We cannot remove sun light from the map, if it is in the RGB image, it will appear in the map.
cheers,
Mathieu
URL: http://official-rtab-map-forum.206.s1.nabble.com/rtabmap-ros-outdoor-3D-mapping-tp6104p6134.html
Hi,
If you are using rtabmap.launch, set imu_topic argument to topic of your IMU. It can be roughly synchronized with the zed. If rtabmap node is used directly, add the remap for "imu" topic. Make sure TF between imu and the zed is accurate (at least for orientation). Then to use the gravity constraints in the graph, add parameter "--Optimizer/GravitySigma 0.3". On loop closures, it will optimize the graph to be aligned with gravity.
To run a database again like a rosbag:
$ roslaunch rtabmap_ros rtabmap.launch \ args:="-d --Rtabmap/DetectionRate 0" \ visual_odometry:=false \ rgb_topic:=/rgb/image \ depth_topic:=/depth_registered/image \ camera_info_topic:=/rgb/camera_info \ odom_frame_id:=odom \ frame_id:=base_link \ use_sim_time:=true $ rosrun rtabmap_ros data_player \ _database:=~/Downloads/rtabmap.db \ _rate:=1 \ --clock"rate" argument can be used to play the database faster (>1) than real-time. Note that odometry is not recomputed, the one from the real experiment is used directly. It is why most of the time a rosbag is the preferred way to record data.
The not aligned wall is a depth computation issue, the zed algorithm interpolates a lot on featureless surfaces. I think the pose is good, but the wall is very distorted. There are maybe parameters on zed side to avoid creating depth on featureless surfaces like that.
What kind of problems is causing the sun light? We cannot remove sun light from the map, if it is in the RGB image, it will appear in the map.
cheers,
Mathieu
| Free forum by Nabble | Edit this page |