Re: Noisy Global Map using ZEDm causing obstacle avoidance navigation problem
Posted by matlabbe on
URL: http://official-rtab-map-forum.206.s1.nabble.com/Noisy-Global-Map-using-ZEDm-causing-obstacle-avoidance-navigation-problem-tp6039p6151.html
Hi,
I opened your database, edited it like in your video, then re-opened in rviz in localization mode:
It seems ok. However, from the video, it seems that the map is reconstructed at each iteration when receiving new data. What parameters are you using in your launch file for rtabmap node?
I tried to reproduce the problem with demo_mapping.bag from here:
1) Mapping the first 30 sec of the bag:
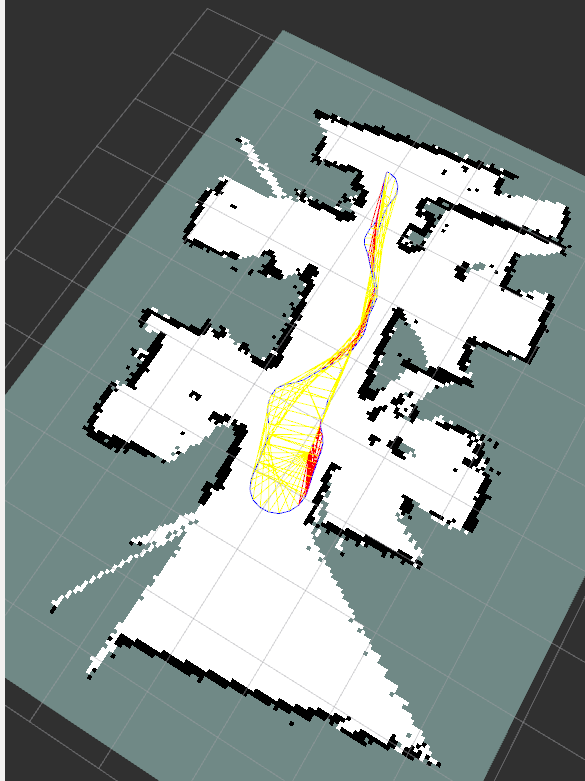
2) Edit the map in rtabmap-databaseViewer (File->Edit optimized 2D map...)

3) Relaunch the demo launch file in localization mode:
URL: http://official-rtab-map-forum.206.s1.nabble.com/Noisy-Global-Map-using-ZEDm-causing-obstacle-avoidance-navigation-problem-tp6039p6151.html
Hi,
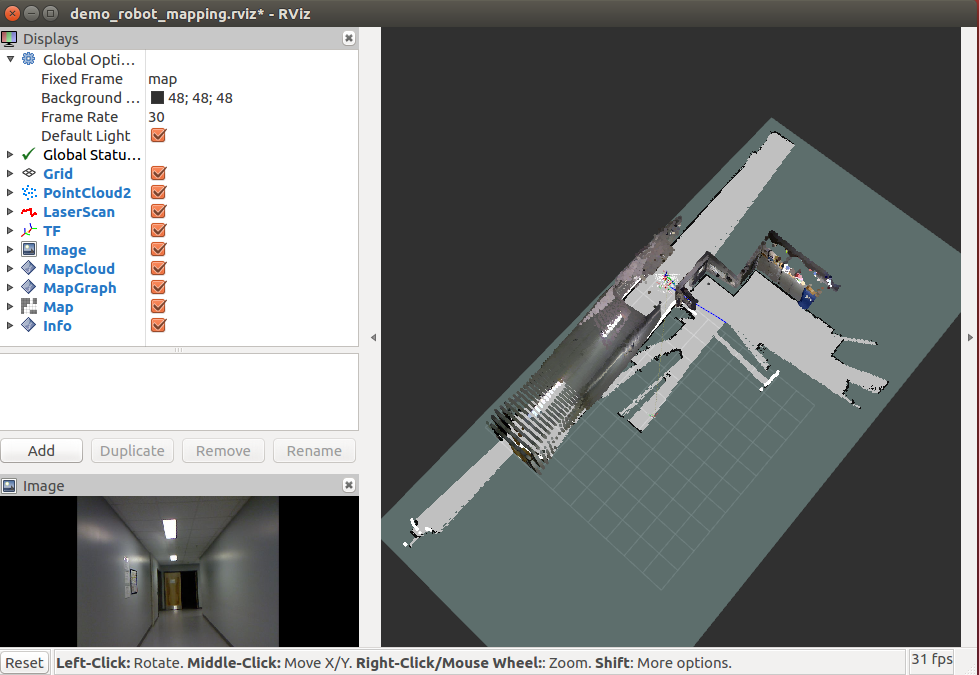
I opened your database, edited it like in your video, then re-opened in rviz in localization mode:
$ mv ~/Downloads/rtabmap.db ~/.ros/rtabmap.db $ roslaunch rtabmap_ros rtabmap.launch localization:=true rviz:=true $ rosservice call /rtabmap/publish_map 1 1 0
It seems ok. However, from the video, it seems that the map is reconstructed at each iteration when receiving new data. What parameters are you using in your launch file for rtabmap node?
I tried to reproduce the problem with demo_mapping.bag from here:
1) Mapping the first 30 sec of the bag:
roslaunch rtabmap_ros demo_robot_mapping.launch rviz:=true rtabmapviz:=false rosbag play --clock demo_mapping.bag
2) Edit the map in rtabmap-databaseViewer (File->Edit optimized 2D map...)
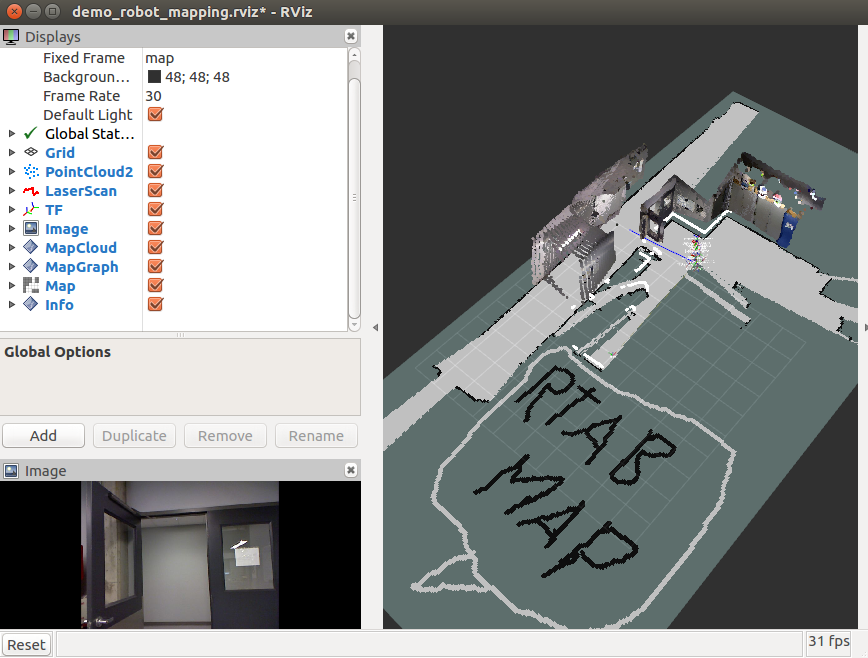
3) Relaunch the demo launch file in localization mode:
$ roslaunch rtabmap_ros demo_robot_mapping.launch rviz:=true rtabmapviz:=false localization:=true $ rosbag play --clock demo_mapping.bag
| Free forum by Nabble | Edit this page |