Re: Stereo Navigation and Mapping
Posted by Markus on
URL: http://official-rtab-map-forum.206.s1.nabble.com/Stereo-Navigation-and-Mapping-tp619p621.html
Thank you so much.
I highly appreciate your help and I cannot tell
how great your support is you offer.
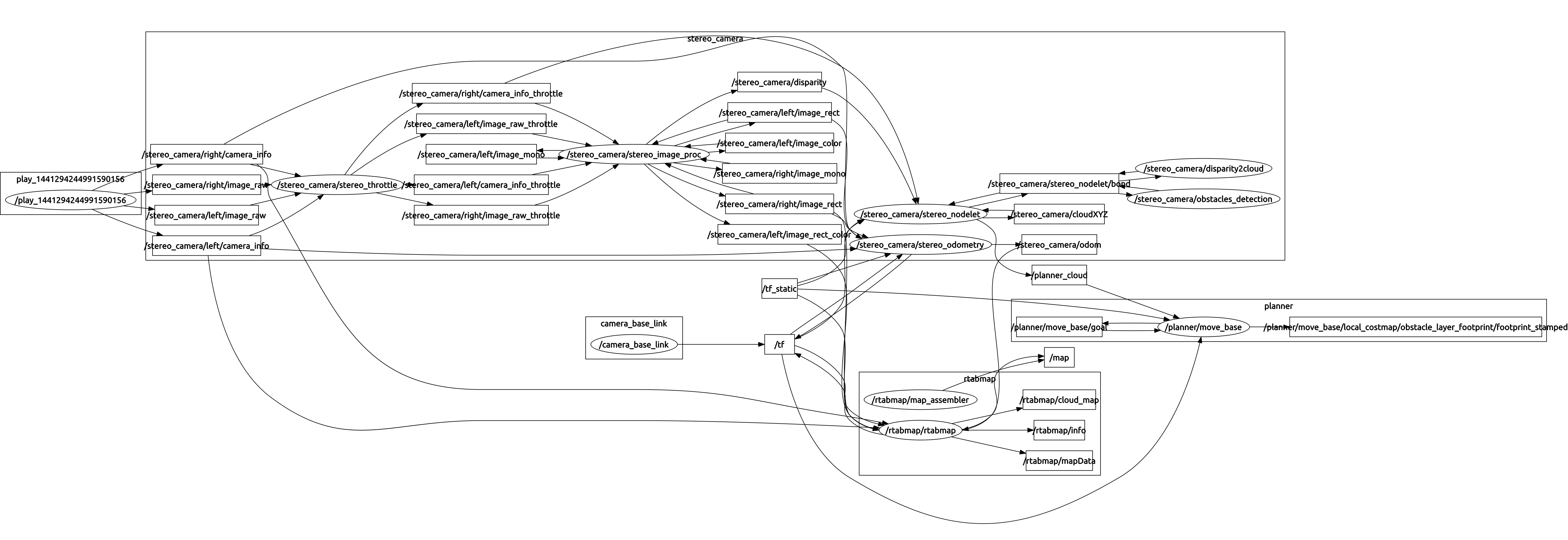
Now, the system is running without errors or warnings.
The Graph looks as follows:
For the sake of sharing I provide here my "final" launch file:
URL: http://official-rtab-map-forum.206.s1.nabble.com/Stereo-Navigation-and-Mapping-tp619p621.html
Thank you so much.
I highly appreciate your help and I cannot tell
how great your support is you offer.
Now, the system is running without errors or warnings.
The Graph looks as follows:
For the sake of sharing I provide here my "final" launch file:
<launch>
<arg name="rviz" default="true" />
<arg name="pi/2" value="1.5707963267948966" />
<arg name="optical_rotate" value="-$(arg pi/2) 0 -$(arg pi/2)" />
<arg name="optical_translate" value="-0.10 0 0.72" />
<arg name="sim" default="false" />
<group ns="planner">
<remap from="openni_points" to="/planner_cloud"/>
<remap from="base_scan" to="/base_scan"/>
<remap from="map" to="/map"/>
<remap from="move_base_simple/goal" to="/planner_goal"/>
<node pkg="move_base" type="move_base" respawn="false" name="move_base" output="screen">
<rosparam file="$(find rtabmap_ros)/launch/pioneer3/config/costmap_common_params.yaml" command="load" ns="global_costmap" />
<rosparam file="$(find rtabmap_ros)/launch/pioneer3/config/costmap_common_params.yaml" command="load" ns="local_costmap" />
<rosparam file="$(find rtabmap_ros)/launch/pioneer3/config/local_costmap_params_3d.yaml" command="load" />
<rosparam file="$(find rtabmap_ros)/launch/pioneer3/config/global_costmap_params.yaml" command="load" />
<rosparam file="$(find rtabmap_ros)/launch/pioneer3/config/base_local_planner_params.yaml" command="load" />
</node>
</group>
<node pkg="tf" type="static_transform_publisher" name="camera_base_link"
args="$(arg optical_translate) $(arg optical_rotate) base_link stereo_camera 100" />
<group ns="/stereo_camera" >
<node pkg="nodelet" type="nodelet" name="stereo_throttle" args="standalone rtabmap_ros/stereo_throttle stereo_nodelet">
<remap from="left/image" to="left/image_raw"/>
<remap from="right/image" to="right/image_raw"/>
<remap from="left/camera_info" to="left/camera_info"/>
<remap from="right/camera_info" to="right/camera_info"/>
</node>
<node pkg="stereo_image_proc" type="stereo_image_proc" name="stereo_image_proc">
<remap from="left/image_raw" to="left/image_raw_throttle"/>
<remap from="left/camera_info" to="left/camera_info_throttle"/>
<remap from="right/image_raw" to="right/image_raw_throttle"/>
<remap from="right/camera_info" to="right/camera_info_throttle"/>
</node>
<node pkg="nodelet" type="nodelet" name="stereo_nodelet" args="manager"/>
<node pkg="nodelet" type="nodelet" name="disparity2cloud" args="load rtabmap_ros/point_cloud_xyz stereo_nodelet">
<remap from="disparity/image" to="disparity"/>
<remap from="disparity/camera_info" to="right/camera_info_throttle"/>
<remap from="cloud" to="cloudXYZ"/>
</node>
<node pkg="nodelet" type="nodelet" name="obstacles_detection" args="load rtabmap_ros/obstacles_detection stereo_nodelet">
<remap from="cloud" to="cloudXYZ"/>
<remap from="obstacles" to="/planner_cloud"/>
</node>
<node pkg="rtabmap_ros" type="stereo_odometry" name="stereo_odometry" output="screen">
<remap from="left/image_rect" to="left/image_rect"/>
<remap from="right/image_rect" to="right/image_rect"/>
<remap from="left/camera_info" to="left/camera_info"/>
<remap from="right/camera_info" to="right/camera_info"/>
</node>
</group>
<group ns="rtabmap">
<node name="rtabmap" pkg="rtabmap_ros" type="rtabmap" output="screen" args="--delete_db_on_start">
<remap from="left/image_rect" to="/stereo_camera/left/image_rect_color"/>
<remap from="right/image_rect" to="/stereo_camera/right/image_rect"/>
<remap from="left/camera_info" to="/stereo_camera/left/camera_info"/>
<remap from="right/camera_info" to="/stereo_camera/right/camera_info"/>
<remap from="odom" to="/stereo_camera/odom"/>
<remap from="proj_map" to="/map"/>
</node>
<node pkg="rtabmap_ros" type="map_assembler" name="map_assembler">
<remap from="mapData" to="mapData_optimized"/>
<remap from="grid_projection_map" to="/map"/>
</node>
</group>
<node if="$(arg rviz)" pkg="rviz" type="rviz" name="rviz" args="-d $(find rtabmap_ros)/launch/config/jtl_stereo.rviz"/>
</launch>
| Free forum by Nabble | Edit this page |