Re: Autonomous Navigation using RTAB-Map's RGBD Odometry
Posted by Drane on
URL: http://official-rtab-map-forum.206.s1.nabble.com/Autonomous-Navigation-using-RTAB-Map-s-RGBD-Odometry-tp6223p6233.html
The robot is still spinning in place and I can't set the 2D Pose Estimate & 2D Nav Goal in rviz. Here are the errors:
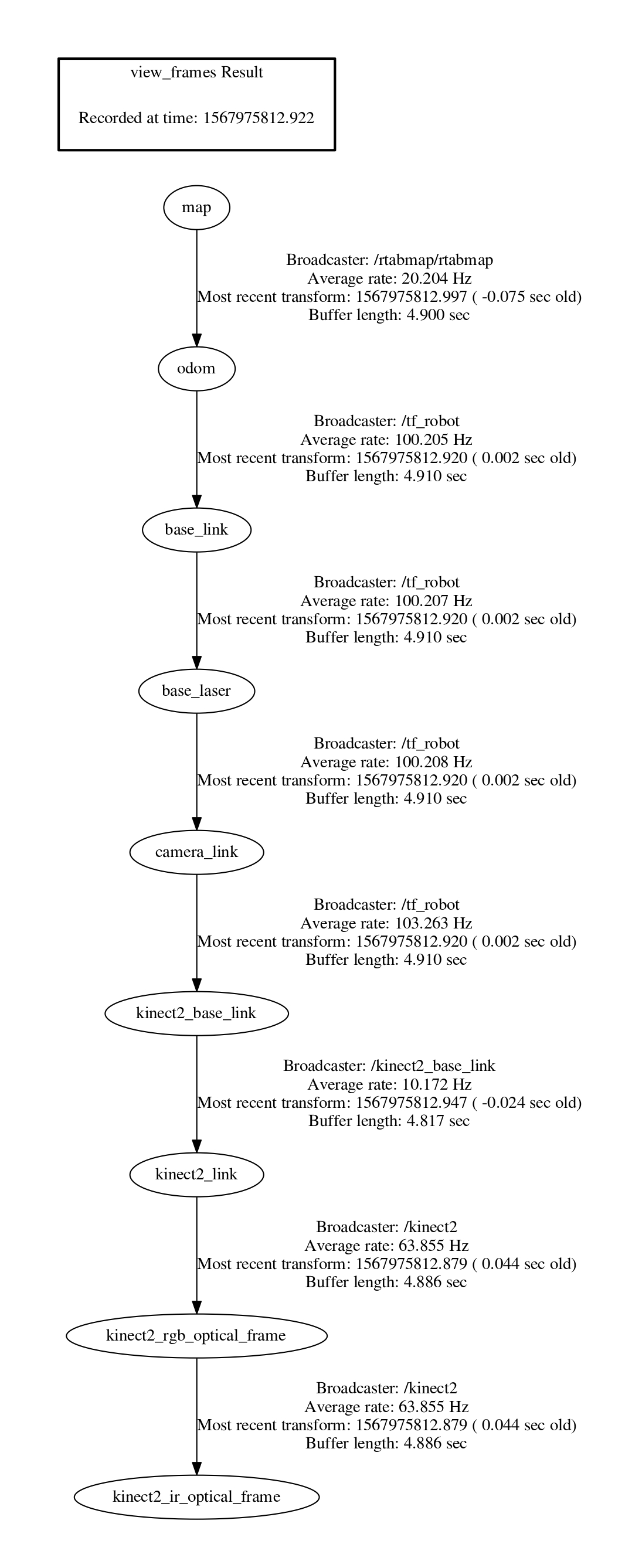
Here is the tf frames:
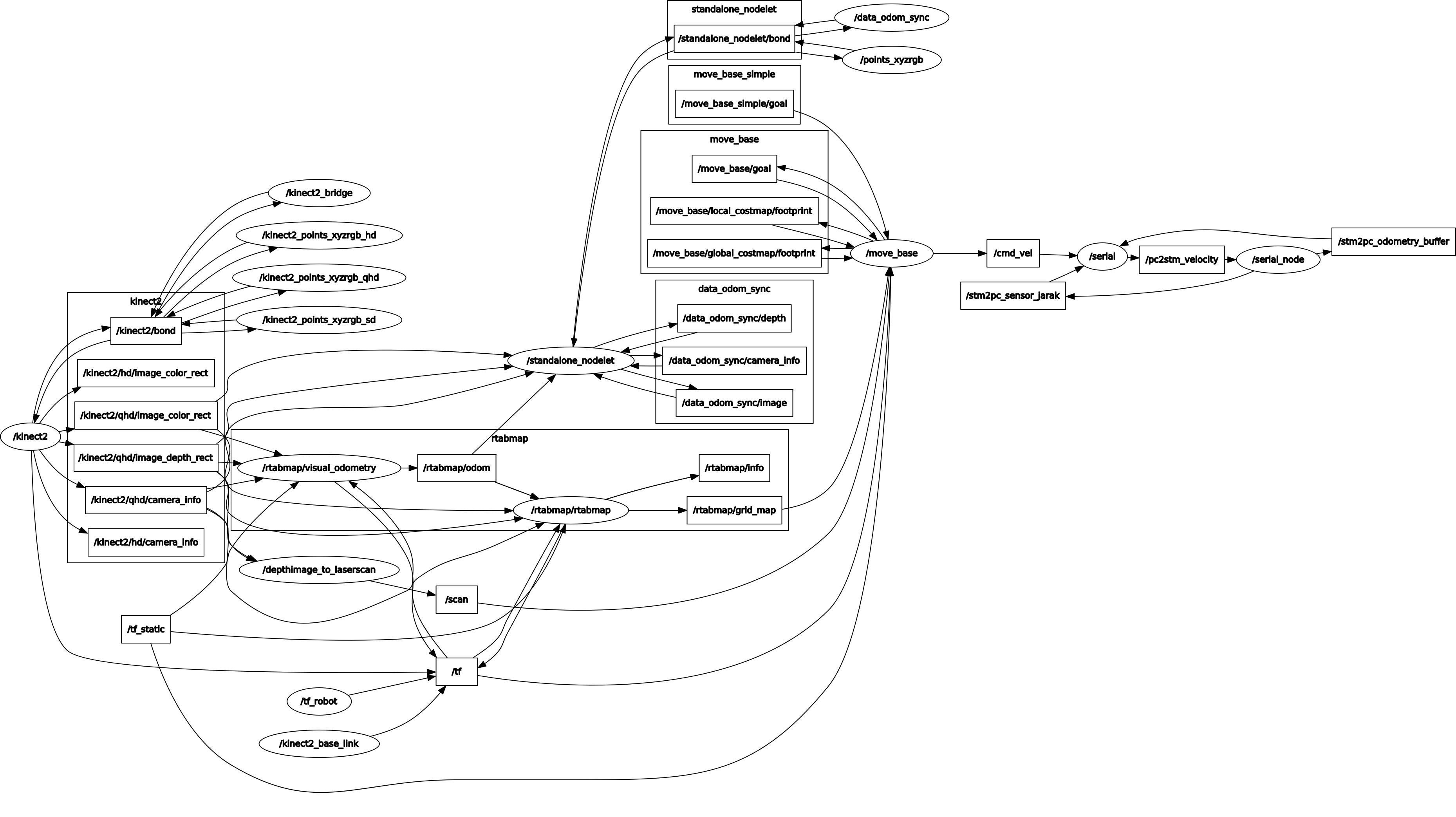
Here is the rqt graph:
URL: http://official-rtab-map-forum.206.s1.nabble.com/Autonomous-Navigation-using-RTAB-Map-s-RGBD-Odometry-tp6223p6233.html
The robot is still spinning in place and I can't set the 2D Pose Estimate & 2D Nav Goal in rviz. Here are the errors:
rgbd_mapping_kinect2.launch [ERROR] (2019-09-09 03:26:58.794) Rtabmap.cpp:1038::process() RGB-D SLAM mode is enabled, memory is incremental but no odometry is provided. Image 8468 is ignored! [ INFO] [1567974418.794618451]: rtabmap (535): Rate=1.00s, Limit=0.000s, RTAB-Map=0.0001s, Maps update=0.0000s pub=0.0000s (local map=253, WM=253) [ WARN] (2019-09-09 03:26:58.891) OdometryF2M.cpp:477::computeTransform() Registration failed: "Not enough inliers 0/20 (matches=9) between -1 and 2134" move_base.launch [ INFO] [1567974190.948698510]: Using plugin "static_layer" [ INFO] [1567974190.999688619]: Requesting the map... [ INFO] [1567974191.219708710]: Resizing costmap to 269 X 282 at 0.050000 m/pix [ INFO] [1567974191.320486571]: Received a 269 X 282 map at 0.050000 m/pix [ INFO] [1567974191.341740947]: Using plugin "obstacle_layer" [ INFO] [1567974191.353381629]: Subscribed to Topics: laser_scan_sensor [ INFO] [1567974191.460013407]: Using plugin "inflation_layer" [ INFO] [1567974191.760341730]: Using plugin "obstacle_layer" [ INFO] [1567974191.772317035]: Subscribed to Topics: laser_scan_sensor [ INFO] [1567974191.839660455]: Using plugin "inflation_layer" [ INFO] [1567974192.056783403]: Created local_planner base_local_planner/TrajectoryPlannerROS [ INFO] [1567974192.117986144]: Sim period is set to 0.05 [ INFO] [1567974192.826001591]: Recovery behavior will clear layer obstacles [ INFO] [1567974323.088857831]: Resizing costmap to 269 X 284 at 0.050000 m/pix [ WARN] [1567974328.125312477]: MessageFilter [target=map base_laser ]: Dropped 100.00% of messages so far. Please turn the [ros.costmap_2d.message_notifier] rosconsole logger to DEBUG for more information. [ WARN] [1567974391.656901867]: Clearing costmap to unstuck robot (3.000000m). [ WARN] [1567974396.706657562]: Rotate recovery behavior started. [ WARN] [1567974518.091658591]: Costmap2DROS transform timeout. Current time: 1567974518.0916, global_pose stamp: 1567974517.7267, tolerance: 0.3000 [ WARN] [1567974518.113011973]: Could not get robot pose, cancelling reconfiguration [ERROR] [1567974672.891736238]: Extrapolation Error looking up robot pose: Lookup would require extrapolation into the past. Requested time 1567974517.726727406 but the earliest data is at time 1567974662.897800108, when looking up transform from frame [base_link] to frame [map] rviz rviz [ WARN] [1567974386.640982387]: MessageFilter [target=map ]: Discarding message from [/move_base] due to empty frame_id. This message will only print once. [ WARN] [1567974386.641653553]: Invalid argument passed to canTransform argument source_frame in tf2 frame_ids cannot be empty
Here is the tf frames:
Here is the rqt graph:
| Free forum by Nabble | Edit this page |