Re: How to Avoid Collision (Obstacle) while navigating using rtabmap_ros and navigation stack
Posted by RTABPK on
URL: http://official-rtab-map-forum.206.s1.nabble.com/How-to-Avoid-Collision-Obstacle-while-navigating-using-rtabmap-ros-and-navigation-stack-tp6309p6326.html
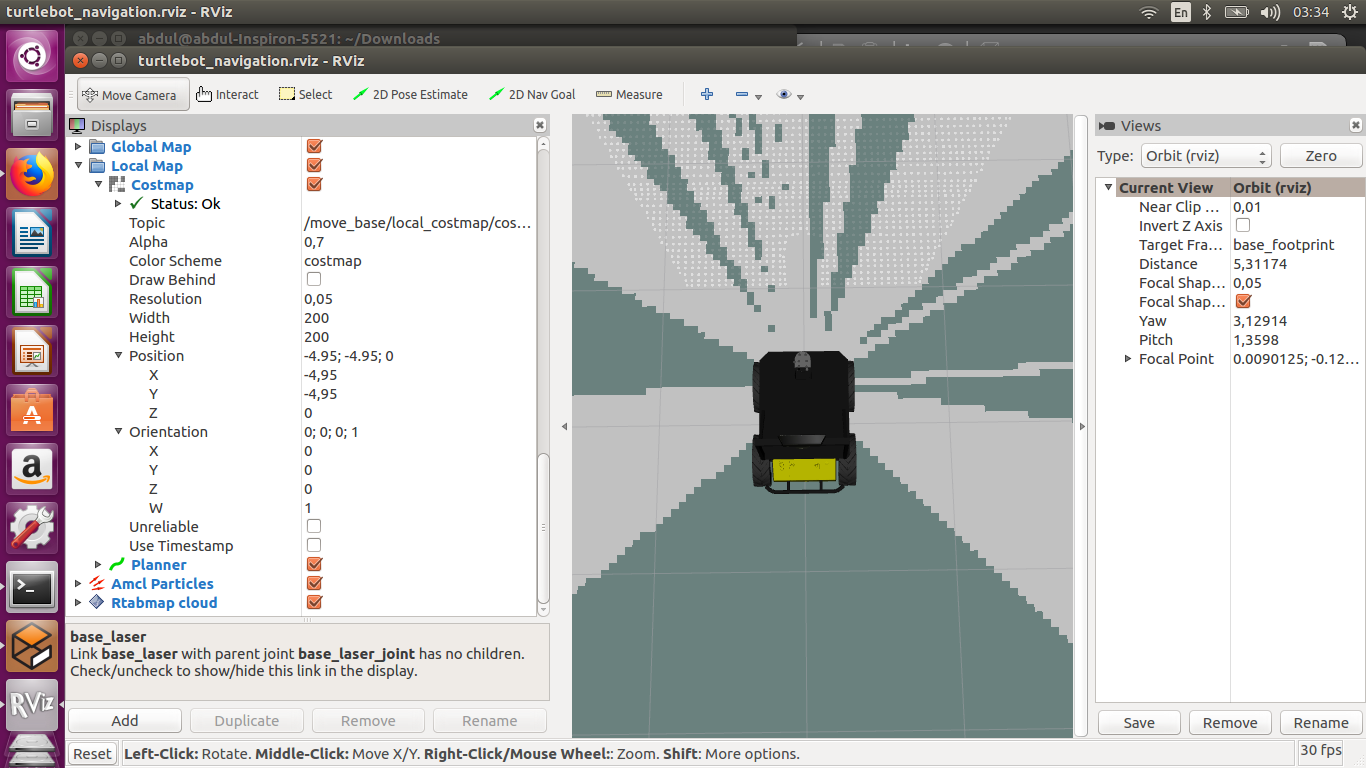
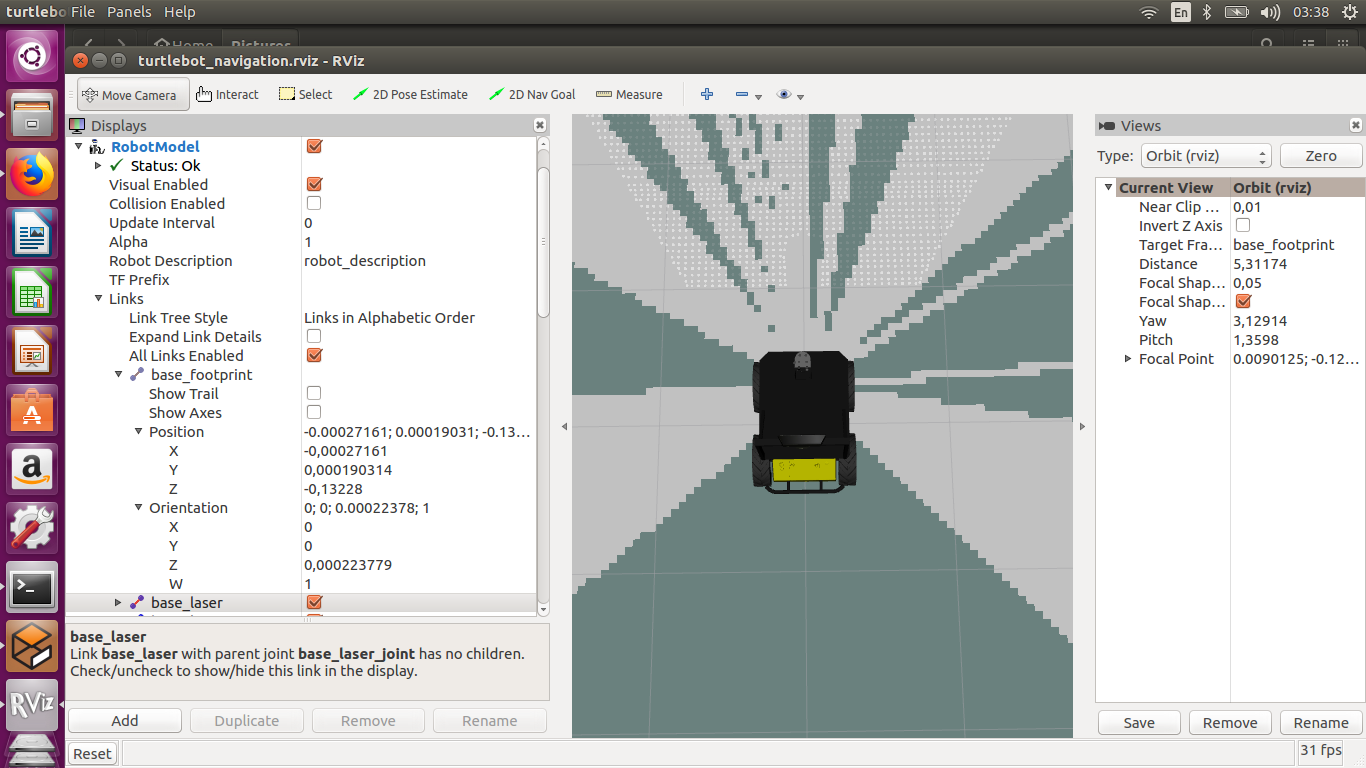
here is the snapshot of my rviz info you asked.
I dont see the footprint clearing parameter in rviz. rqt_reconfigure results "command not found". And in localization mode I revisited the same place with almost same camera point of view.
Here is my move_base settings and note that I have already shared my robot's description file which will give an idea of size of the robot. I am using husky robot (Clearpathrobotics model)
COSTMAP_COMMON.yaml
footprint: [[-0.5, -0.33], [-0.5, 0.33], [0.5, 0.33], [0.5, -0.33]]
footprint_padding: 0.01
robot_base_frame: base_link
update_frequency: 4.0
publish_frequency: 3.0
transform_tolerance: 0.5
resolution: 0.05
obstacle_range: 7.5
raytrace_range: 6.0
#layer definitions
static:
map_topic: /map
subscribe_to_updates: true
obstacles_laser:
observation_sources: laser
laser: {data_type: LaserScan, clearing: true, marking: true, topic: scan, inf_is_valid: true}
inflation:
inflation_radius: 3.0
COSTMAP_LOCAL.yaml
global_frame: odom
rolling_window: true
plugins:
- {name: obstacles_laser, type: "costmap_2d::ObstacleLayer"}
- {name: inflation, type: "costmap_2d::InflationLayer"}
COSTMAP_Global_Static.yaml
global_frame: map
rolling_window: false
track_unknown_space: true
plugins:
- {name: static, type: "costmap_2d::StaticLayer"}
- {name: inflation, type: "costmap_2d::InflationLayer"}
COSTMAP_Global_laser.yaml
global_frame: odom
rolling_window: false
track_unknown_space: true
plugins:
- {name: obstacles_laser, type: "costmap_2d::ObstacleLayer"}
- {name: inflation, type: "costmap_2d::InflationLayer"}
COSTMAP_Exploration.yml
track_unknown_space: true
global_frame: map
rolling_window: false
plugins:
- {name: external, type: "costmap_2d::StaticLayer"}
- {name: explore_boundary, type: "frontier_exploration::BoundedExploreLayer"}
#Can disable sensor layer if gmapping is fast enough to update scans
- {name: obstacles_laser, type: "costmap_2d::ObstacleLayer"}
- {name: inflation, type: "costmap_2d::InflationLayer"}
explore_boundary:
resize_to_boundary: false
frontier_travel_point: middle
#set to false for gmapping, true if re-exploring a known area
explore_clear_space: false
Planner.yaml
controller_frequency: 5.0
recovery_behaviour_enabled: true
NavfnROS:
allow_unknown: true # Specifies whether or not to allow navfn to create plans that traverse unknown space.
default_tolerance: 0.1 # A tolerance on the goal point for the planner.
TrajectoryPlannerROS:
# Robot Configuration Parameters
acc_lim_x: 2.5
acc_lim_theta: 3.2
max_vel_x: 1.0
min_vel_x: 0.0
max_vel_theta: 1.0
min_vel_theta: -1.0
min_in_place_vel_theta: 0.2
holonomic_robot: false
escape_vel: -0.1
# Goal Tolerance Parameters
yaw_goal_tolerance: 0.1
xy_goal_tolerance: 0.2
latch_xy_goal_tolerance: false
# Forward Simulation Parameters
sim_time: 2.0
sim_granularity: 0.02
angular_sim_granularity: 0.02
vx_samples: 6
vtheta_samples: 20
controller_frequency: 20.0
# Trajectory scoring parameters
meter_scoring: true # Whether the gdist_scale and pdist_scale parameters should assume that goal_distance and path_distance are expressed in units of meters or cells. Cells are assumed by default (false).
occdist_scale: 0.1 #The weighting for how much the controller should attempt to avoid obstacles. default 0.01
pdist_scale: 0.75 # The weighting for how much the controller should stay close to the path it was given . default 0.6
gdist_scale: 1.0 # The weighting for how much the controller should attempt to reach its local goal, also controls speed default 0.8
heading_lookahead: 0.325 #How far to look ahead in meters when scoring different in-place-rotation trajectories
heading_scoring: false #Whether to score based on the robot's heading to the path or its distance from the path. default false
heading_scoring_timestep: 0.8 #How far to look ahead in time in seconds along the simulated trajectory when using heading scoring (double, default: 0.8)
dwa: true #Whether to use the Dynamic Window Approach (DWA)_ or whether to use Trajectory Rollout
simple_attractor: false
publish_cost_grid_pc: true
# Oscillation Prevention Parameters
oscillation_reset_dist: 0.25 #How far the robot must travel in meters before oscillation flags are reset (double, default: 0.05)
escape_reset_dist: 0.1
escape_reset_theta: 0.1
DWAPlannerROS:
# Robot configuration parameters
acc_lim_x: 2.5
acc_lim_y: 0
acc_lim_th: 3.2
max_vel_x: 0.5
min_vel_x: 0.0
max_vel_y: 0
min_vel_y: 0
max_trans_vel: 0.5
min_trans_vel: 0.1
max_rot_vel: 1.0
min_rot_vel: 0.2
# Goal Tolerance Parameters
yaw_goal_tolerance: 0.1
xy_goal_tolerance: 0.2
latch_xy_goal_tolerance: false
# # Forward Simulation Parameters
# sim_time: 2.0
# sim_granularity: 0.02
# vx_samples: 6
# vy_samples: 0
# vtheta_samples: 20
# penalize_negative_x: true
# # Trajectory scoring parameters
# path_distance_bias: 32.0 # The weighting for how much the controller should stay close to the path it was given
# goal_distance_bias: 24.0 # The weighting for how much the controller should attempt to reach its local goal, also controls speed
# occdist_scale: 0.01 # The weighting for how much the controller should attempt to avoid obstacles
# forward_point_distance: 0.325 # The distance from the center point of the robot to place an additional scoring point, in meters
# stop_time_buffer: 0.2 # The amount of time that the robot must stThe absolute value of the veolicty at which to start scaling the robot's footprint, in m/sop before a collision in order for a trajectory to be considered valid in seconds
# scaling_speed: 0.25 # The absolute value of the veolicty at which to start scaling the robot's footprint, in m/s
# max_scaling_factor: 0.2 # The maximum factor to scale the robot's footprint by
# # Oscillation Prevention Parameters
# oscillation_reset_dist: 0.25 #How far the robot must travel in meters before oscillation flags are reset (double, default: 0.05)
URL: http://official-rtab-map-forum.206.s1.nabble.com/How-to-Avoid-Collision-Obstacle-while-navigating-using-rtabmap-ros-and-navigation-stack-tp6309p6326.html
here is the snapshot of my rviz info you asked.
I dont see the footprint clearing parameter in rviz. rqt_reconfigure results "command not found". And in localization mode I revisited the same place with almost same camera point of view.
Here is my move_base settings and note that I have already shared my robot's description file which will give an idea of size of the robot. I am using husky robot (Clearpathrobotics model)
COSTMAP_COMMON.yaml
footprint: [[-0.5, -0.33], [-0.5, 0.33], [0.5, 0.33], [0.5, -0.33]]
footprint_padding: 0.01
robot_base_frame: base_link
update_frequency: 4.0
publish_frequency: 3.0
transform_tolerance: 0.5
resolution: 0.05
obstacle_range: 7.5
raytrace_range: 6.0
#layer definitions
static:
map_topic: /map
subscribe_to_updates: true
obstacles_laser:
observation_sources: laser
laser: {data_type: LaserScan, clearing: true, marking: true, topic: scan, inf_is_valid: true}
inflation:
inflation_radius: 3.0
COSTMAP_LOCAL.yaml
global_frame: odom
rolling_window: true
plugins:
- {name: obstacles_laser, type: "costmap_2d::ObstacleLayer"}
- {name: inflation, type: "costmap_2d::InflationLayer"}
COSTMAP_Global_Static.yaml
global_frame: map
rolling_window: false
track_unknown_space: true
plugins:
- {name: static, type: "costmap_2d::StaticLayer"}
- {name: inflation, type: "costmap_2d::InflationLayer"}
COSTMAP_Global_laser.yaml
global_frame: odom
rolling_window: false
track_unknown_space: true
plugins:
- {name: obstacles_laser, type: "costmap_2d::ObstacleLayer"}
- {name: inflation, type: "costmap_2d::InflationLayer"}
COSTMAP_Exploration.yml
track_unknown_space: true
global_frame: map
rolling_window: false
plugins:
- {name: external, type: "costmap_2d::StaticLayer"}
- {name: explore_boundary, type: "frontier_exploration::BoundedExploreLayer"}
#Can disable sensor layer if gmapping is fast enough to update scans
- {name: obstacles_laser, type: "costmap_2d::ObstacleLayer"}
- {name: inflation, type: "costmap_2d::InflationLayer"}
explore_boundary:
resize_to_boundary: false
frontier_travel_point: middle
#set to false for gmapping, true if re-exploring a known area
explore_clear_space: false
Planner.yaml
controller_frequency: 5.0
recovery_behaviour_enabled: true
NavfnROS:
allow_unknown: true # Specifies whether or not to allow navfn to create plans that traverse unknown space.
default_tolerance: 0.1 # A tolerance on the goal point for the planner.
TrajectoryPlannerROS:
# Robot Configuration Parameters
acc_lim_x: 2.5
acc_lim_theta: 3.2
max_vel_x: 1.0
min_vel_x: 0.0
max_vel_theta: 1.0
min_vel_theta: -1.0
min_in_place_vel_theta: 0.2
holonomic_robot: false
escape_vel: -0.1
# Goal Tolerance Parameters
yaw_goal_tolerance: 0.1
xy_goal_tolerance: 0.2
latch_xy_goal_tolerance: false
# Forward Simulation Parameters
sim_time: 2.0
sim_granularity: 0.02
angular_sim_granularity: 0.02
vx_samples: 6
vtheta_samples: 20
controller_frequency: 20.0
# Trajectory scoring parameters
meter_scoring: true # Whether the gdist_scale and pdist_scale parameters should assume that goal_distance and path_distance are expressed in units of meters or cells. Cells are assumed by default (false).
occdist_scale: 0.1 #The weighting for how much the controller should attempt to avoid obstacles. default 0.01
pdist_scale: 0.75 # The weighting for how much the controller should stay close to the path it was given . default 0.6
gdist_scale: 1.0 # The weighting for how much the controller should attempt to reach its local goal, also controls speed default 0.8
heading_lookahead: 0.325 #How far to look ahead in meters when scoring different in-place-rotation trajectories
heading_scoring: false #Whether to score based on the robot's heading to the path or its distance from the path. default false
heading_scoring_timestep: 0.8 #How far to look ahead in time in seconds along the simulated trajectory when using heading scoring (double, default: 0.8)
dwa: true #Whether to use the Dynamic Window Approach (DWA)_ or whether to use Trajectory Rollout
simple_attractor: false
publish_cost_grid_pc: true
# Oscillation Prevention Parameters
oscillation_reset_dist: 0.25 #How far the robot must travel in meters before oscillation flags are reset (double, default: 0.05)
escape_reset_dist: 0.1
escape_reset_theta: 0.1
DWAPlannerROS:
# Robot configuration parameters
acc_lim_x: 2.5
acc_lim_y: 0
acc_lim_th: 3.2
max_vel_x: 0.5
min_vel_x: 0.0
max_vel_y: 0
min_vel_y: 0
max_trans_vel: 0.5
min_trans_vel: 0.1
max_rot_vel: 1.0
min_rot_vel: 0.2
# Goal Tolerance Parameters
yaw_goal_tolerance: 0.1
xy_goal_tolerance: 0.2
latch_xy_goal_tolerance: false
# # Forward Simulation Parameters
# sim_time: 2.0
# sim_granularity: 0.02
# vx_samples: 6
# vy_samples: 0
# vtheta_samples: 20
# penalize_negative_x: true
# # Trajectory scoring parameters
# path_distance_bias: 32.0 # The weighting for how much the controller should stay close to the path it was given
# goal_distance_bias: 24.0 # The weighting for how much the controller should attempt to reach its local goal, also controls speed
# occdist_scale: 0.01 # The weighting for how much the controller should attempt to avoid obstacles
# forward_point_distance: 0.325 # The distance from the center point of the robot to place an additional scoring point, in meters
# stop_time_buffer: 0.2 # The amount of time that the robot must stThe absolute value of the veolicty at which to start scaling the robot's footprint, in m/sop before a collision in order for a trajectory to be considered valid in seconds
# scaling_speed: 0.25 # The absolute value of the veolicty at which to start scaling the robot's footprint, in m/s
# max_scaling_factor: 0.2 # The maximum factor to scale the robot's footprint by
# # Oscillation Prevention Parameters
# oscillation_reset_dist: 0.25 #How far the robot must travel in meters before oscillation flags are reset (double, default: 0.05)
| Free forum by Nabble | Edit this page |