Slam using Intel RealSense tracking camera - T265
Posted by nikitha on
URL: http://official-rtab-map-forum.206.s1.nabble.com/Slam-using-Intel-RealSense-tracking-camera-T265-tp6333.html
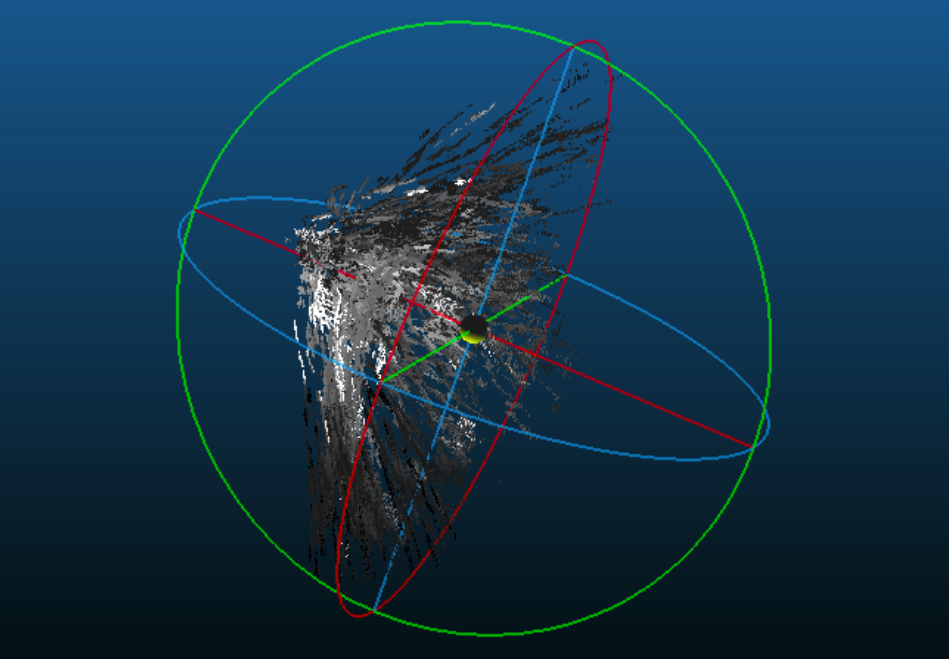
I am trying to construct a point cloud of the scene using T265 camera(having fish-eye lens). However the reconstruction appears as follows when exported and viewed in CloudCompare.
My lauch files are as follows
stereo_t265_m.launch
rs_t265_m.launch
As the /camera/fisheye2/camera_info topic of the right fish eye camera was publishing a 0 in P(0,3) and resulting an error stating that the baseline is zero, I have manually edited that value alone and published the info data via another topic right/info.
Graph looks as follows
rosgraph.svg
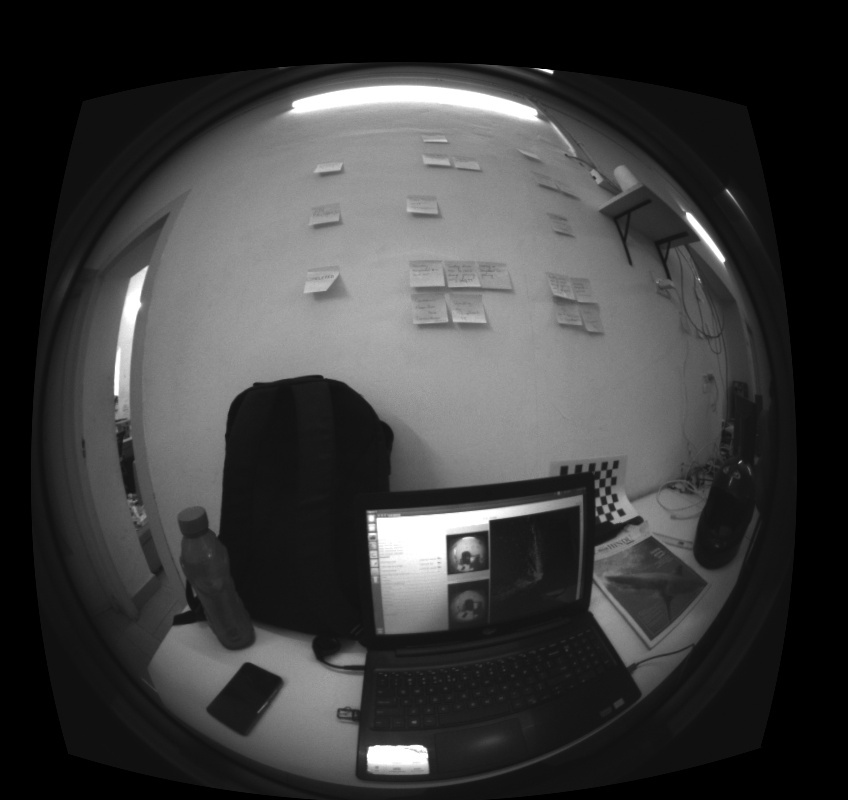
The images when extracted from the database appear like this
When the data coming from /points2 topic of stereo_image_proc node is visualised in rviz, i see a single point that moves as the camera moves.
Kindly let me know what changes are required to achieve proper reconstruction of the scene.
Thank You
URL: http://official-rtab-map-forum.206.s1.nabble.com/Slam-using-Intel-RealSense-tracking-camera-T265-tp6333.html
I am trying to construct a point cloud of the scene using T265 camera(having fish-eye lens). However the reconstruction appears as follows when exported and viewed in CloudCompare.
My lauch files are as follows
stereo_t265_m.launch
rs_t265_m.launch
As the /camera/fisheye2/camera_info topic of the right fish eye camera was publishing a 0 in P(0,3) and resulting an error stating that the baseline is zero, I have manually edited that value alone and published the info data via another topic right/info.
Graph looks as follows
rosgraph.svg
The images when extracted from the database appear like this
When the data coming from /points2 topic of stereo_image_proc node is visualised in rviz, i see a single point that moves as the camera moves.
Kindly let me know what changes are required to achieve proper reconstruction of the scene.
Thank You
| Free forum by Nabble | Edit this page |