Re: How to Avoid Collision (Obstacle) while navigating using rtabmap_ros and navigation stack
Posted by matlabbe on
URL: http://official-rtab-map-forum.206.s1.nabble.com/How-to-Avoid-Collision-Obstacle-while-navigating-using-rtabmap-ros-and-navigation-stack-tp6309p6337.html
Hi,
Thx for sharing all the details, but it would be easier if you can reproduce the problem using standard launch files from husky official demos (it will take less time instead of trying to replicate your package on our side, and we don't know also what launch files are used...). For example, if you can reproduce the navigation problems with the following (using official husky launch files), it would be great:
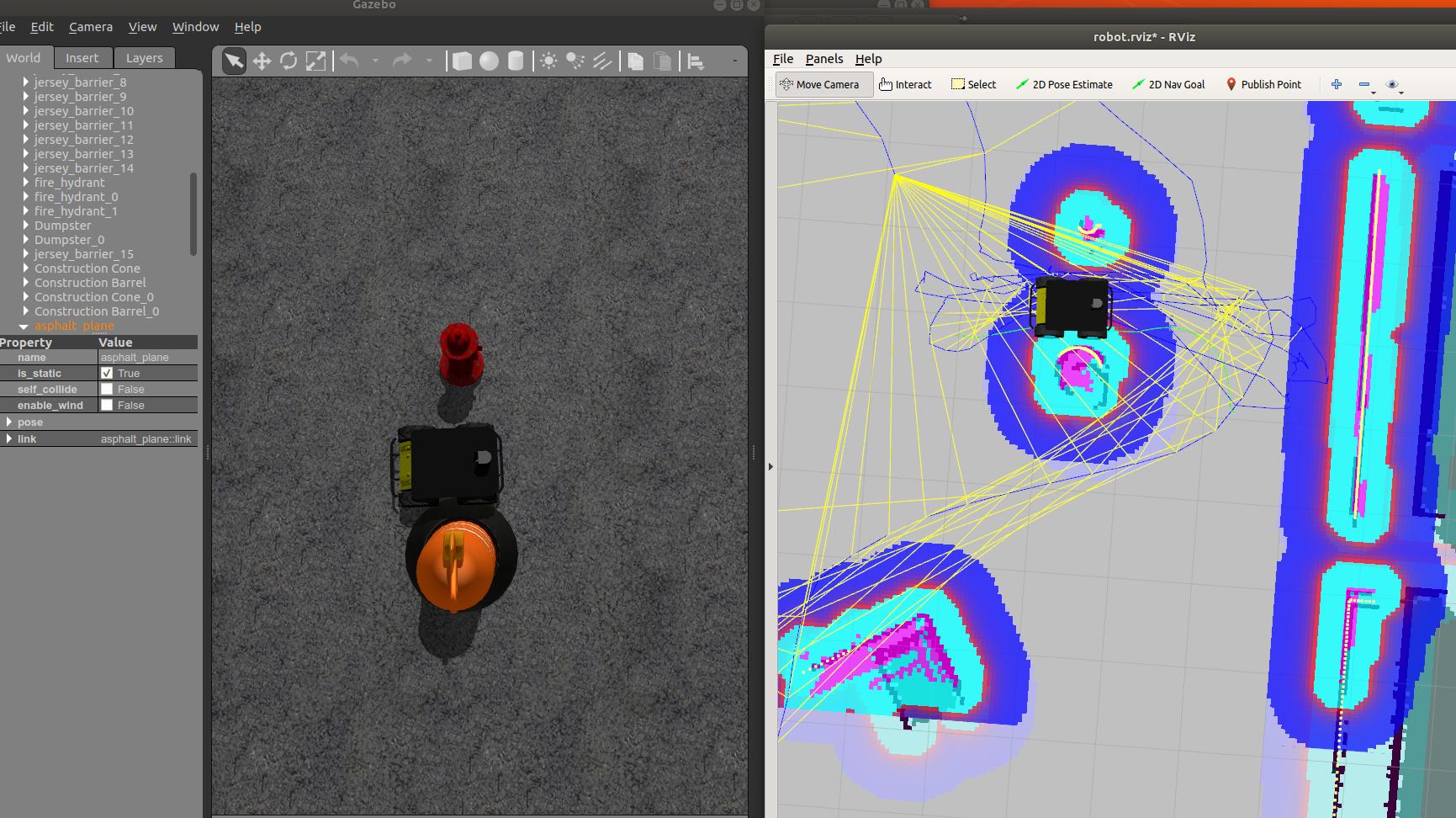
I've sent multiple navigation goals and I have no problems. The only problem I saw is near the following obstacle, which the base cannot be detected by the lidar and the robot moved too much close of it (it is what we would expect as the lidar cannot see the base, the fix would be to increase the footprint radius in the costmap parameters so that the robot navigate farther from obstacles).
URL: http://official-rtab-map-forum.206.s1.nabble.com/How-to-Avoid-Collision-Obstacle-while-navigating-using-rtabmap-ros-and-navigation-stack-tp6309p6337.html
Hi,
Thx for sharing all the details, but it would be easier if you can reproduce the problem using standard launch files from husky official demos (it will take less time instead of trying to replicate your package on our side, and we don't know also what launch files are used...). For example, if you can reproduce the navigation problems with the following (using official husky launch files), it would be great:
$ roslaunch husky_gazebo husky_playpen.launch $ roslaunch husky_navigation move_base.launch $ rosrun rtabmap_ros rtabmap -d \ _subscribe_rgb:=false \ _subscribe_depth:=false \ _subscribe_scan:=true \ odom:=/odometry/filtered \ grid_map:=map \ --RGBD/NeighborLinkRefining true \ --RGBD/ProximityPathMaxNeighbors 5 $ roslaunch husky_viz view_robot.launch
I've sent multiple navigation goals and I have no problems. The only problem I saw is near the following obstacle, which the base cannot be detected by the lidar and the robot moved too much close of it (it is what we would expect as the lidar cannot see the base, the fix would be to increase the footprint radius in the costmap parameters so that the robot navigate farther from obstacles).
| Free forum by Nabble | Edit this page |