Re: rtabmap_ros outdoor 3D mapping
Posted by acp on
URL: http://official-rtab-map-forum.206.s1.nabble.com/rtabmap-ros-outdoor-3D-mapping-tp6104p6347.html
Hi Mathew.
I have used Kalibr to calibrate the imu topic /mavros/imu/data from the pixhawk 4 mini and the /stereo_camera/left/image_mono /stereo_camera/right/image_mono from the zed camera. I have gotten the following two rotational matrices:
"T_cam_imu: rostopic: /stereo_camera/left/image_mono
- [-0.01172298941818703, -0.9917474694886735, 0.12766960594406557, 0.0009733116714396002]
- [-0.2241398884968312, -0.12182314042441611, -0.9669128362172881, -0.001738025514640773]
- [0.9744864708674659, -0.039950960188021634, -0.22086203584212016, 0.0017137757927055978]
- [0.0, 0.0, 0.0, 1.0]"
T_cam_imu: rostopic: /stereo_camera/right/image_mono
- [-0.0030002316421554875, -0.9920830562172235, 0.12554763309910266, -0.11063708293669737]
- [-0.22017184308270676, -0.1218120127551974, -0.9678254972163587, -0.0018464550183625145]
- [0.9754564870478116, -0.030545754454934293, -0.21806329072340788, 0.0019577491538307953]
- [0.0, 0.0, 0.0, 1.0]
I have used the cam_imu_left rotational and the 3D Rotation Converter to obtain the [xyzw] quaternion angles. Then I have used the getRPY() ROS function to obtain the roll, pitch, yaw angles Roll: -3.00242, Pitch: -1.34878, Yaw: -1.58442. Then I have inserted them into the zed.urdf file as you can see.
<robot name="zed_camera">
<link name="zed_camera_center">
<visual>
<origin xyz="0 0 0" rpy="0 0 0"/>
<geometry>
<mesh filename="package://zed_wrapper/urdf/ZED.stl" />
</geometry>
<material name="light_grey">
<color rgba="0.8 0.8 0.8 0.8"/>
</material>
</visual>
</link>
<link name="base_link" />
<joint name="zed_base_link_camera_center_joint" type="fixed">
<parent link="zed_left_camera_optical_frame"/>
<child link="base_link"/>
<origin xyz="0 0 0" rpy="-3.00242 -1.34878 -1.58442 " />
</joint>
and I have inserted the imu and the Optimizer/GravitySigma as you can see:
<include file="$(find rtabmap_ros)/launch/rtabmap.launch">
<arg name="rtabmap_args" value="--delete_db_on_start --Optimizer/GravitySigma 0.3" />
<arg name="imu_topic" value="/mavros/imu/data"/>
You can also see the two frames in rviz
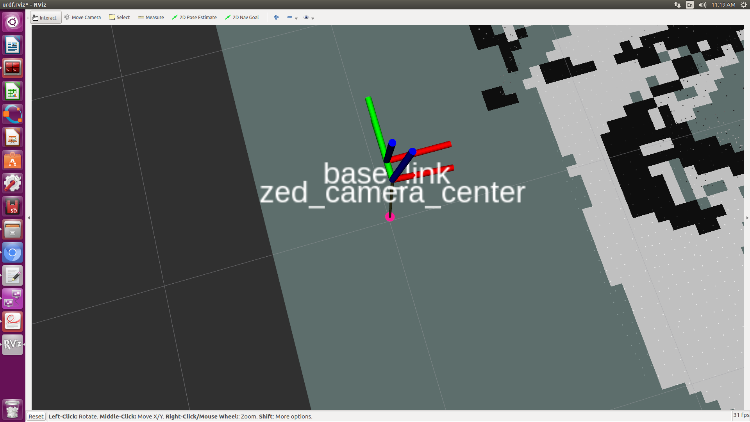
cheers
URL: http://official-rtab-map-forum.206.s1.nabble.com/rtabmap-ros-outdoor-3D-mapping-tp6104p6347.html
Hi Mathew.
I have used Kalibr to calibrate the imu topic /mavros/imu/data from the pixhawk 4 mini and the /stereo_camera/left/image_mono /stereo_camera/right/image_mono from the zed camera. I have gotten the following two rotational matrices:
"T_cam_imu: rostopic: /stereo_camera/left/image_mono
- [-0.01172298941818703, -0.9917474694886735, 0.12766960594406557, 0.0009733116714396002]
- [-0.2241398884968312, -0.12182314042441611, -0.9669128362172881, -0.001738025514640773]
- [0.9744864708674659, -0.039950960188021634, -0.22086203584212016, 0.0017137757927055978]
- [0.0, 0.0, 0.0, 1.0]"
T_cam_imu: rostopic: /stereo_camera/right/image_mono
- [-0.0030002316421554875, -0.9920830562172235, 0.12554763309910266, -0.11063708293669737]
- [-0.22017184308270676, -0.1218120127551974, -0.9678254972163587, -0.0018464550183625145]
- [0.9754564870478116, -0.030545754454934293, -0.21806329072340788, 0.0019577491538307953]
- [0.0, 0.0, 0.0, 1.0]
I have used the cam_imu_left rotational and the 3D Rotation Converter to obtain the [xyzw] quaternion angles. Then I have used the getRPY() ROS function to obtain the roll, pitch, yaw angles Roll: -3.00242, Pitch: -1.34878, Yaw: -1.58442. Then I have inserted them into the zed.urdf file as you can see.
<robot name="zed_camera">
<link name="zed_camera_center">
<visual>
<origin xyz="0 0 0" rpy="0 0 0"/>
<geometry>
<mesh filename="package://zed_wrapper/urdf/ZED.stl" />
</geometry>
<material name="light_grey">
<color rgba="0.8 0.8 0.8 0.8"/>
</material>
</visual>
</link>
<link name="base_link" />
<joint name="zed_base_link_camera_center_joint" type="fixed">
<parent link="zed_left_camera_optical_frame"/>
<child link="base_link"/>
<origin xyz="0 0 0" rpy="-3.00242 -1.34878 -1.58442 " />
</joint>
and I have inserted the imu and the Optimizer/GravitySigma as you can see:
<include file="$(find rtabmap_ros)/launch/rtabmap.launch">
<arg name="rtabmap_args" value="--delete_db_on_start --Optimizer/GravitySigma 0.3" />
<arg name="imu_topic" value="/mavros/imu/data"/>
You can also see the two frames in rviz
The question here if what I have done is correct and what do you think?
cheers
| Free forum by Nabble | Edit this page |