Re: rtabmap_ros outdoor 3D mapping
Posted by acp on
URL: http://official-rtab-map-forum.206.s1.nabble.com/rtabmap-ros-outdoor-3D-mapping-tp6104p6349.html
Hi Mathew.
I am using rtabmap.launch and the zed odom.
I have done the following:
1.- I have set the imu_topic argument to topic of my IMU.
<arg name="imu_topic" value="/mavros/imu/data"/>
2.- I have set the gravity constraint parameter "--Optimizer/GravitySigma 0.3" into the graph
3.- I have set the TF between imu and zed camera.
<joint name="zed_base_link_camera_center_joint" type="fixed">
4.- I have filtered the depth images to remove depth values in textureless areas.
I have a database if you want to take a look
http://www.fit.vutbr.cz/~plascencia/rtabmap_filter_textureless.db
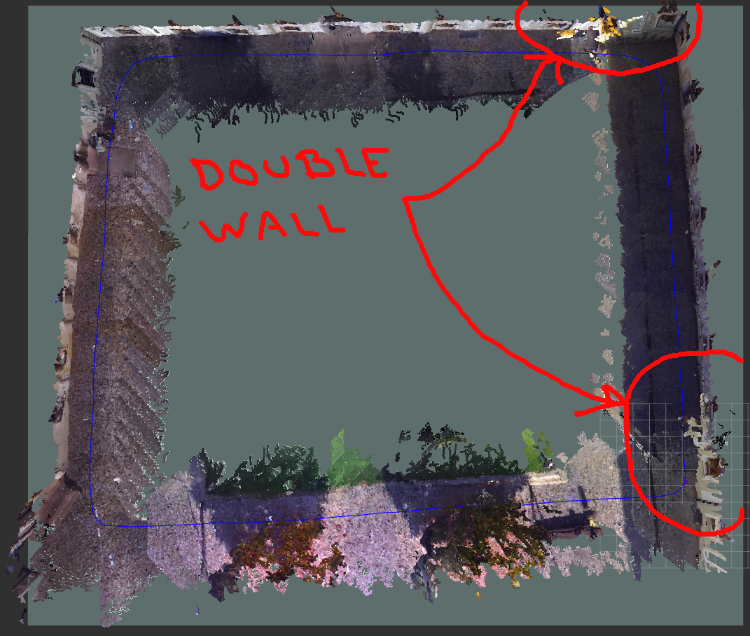
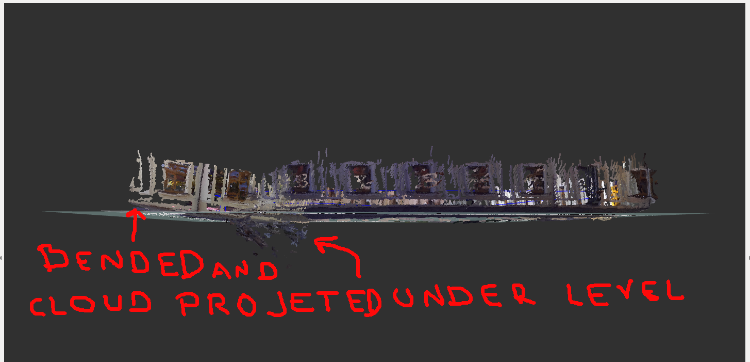
The following pictures show the result of the 3D mapping.

URL: http://official-rtab-map-forum.206.s1.nabble.com/rtabmap-ros-outdoor-3D-mapping-tp6104p6349.html
Hi Mathew.
I am using rtabmap.launch and the zed odom.
<include file="$(find rtabmap_ros)/launch/rtabmap.launch">
<remap from="odom" to="/zed/odom"/>
I have done the following:
1.- I have set the imu_topic argument to topic of my IMU.
<arg name="imu_topic" value="/mavros/imu/data"/>
2.- I have set the gravity constraint parameter "--Optimizer/GravitySigma 0.3" into the graph
<arg name="rtabmap_args" value="--delete_db_on_start --Optimizer/GravitySigma 0.3" />
3.- I have set the TF between imu and zed camera.
<joint name="zed_base_link_camera_center_joint" type="fixed">
<parent link="zed_left_camera_optical_frame"/>
<child link="base_link"/>
<origin xyz="0 0 0" rpy="-3.00242 -1.34878 -1.58442 " />
</joint>
4.- I have filtered the depth images to remove depth values in textureless areas.
<arg name="depth_topic" default="/zed/depth/depth_filtered" />
In the
rtabmap.launch
the previous parameters can not be set, the can be set just in thertabmap_ros
. How can this issue be solve in thertabmap.launch
I have a database if you want to take a look
http://www.fit.vutbr.cz/~plascencia/rtabmap_filter_textureless.db
The following pictures show the result of the 3D mapping.
| Free forum by Nabble | Edit this page |