Re: mapping with kinect v2 + laser scan
Posted by ricardo on
URL: http://official-rtab-map-forum.206.s1.nabble.com/mapping-with-kinect-v2-laser-scan-tp6367p6398.html
Hi Mathieu, I was not precise when I said that that I trying to do a handheld mapping with Laser+Kinect. In my lab we bough a 2d robot however we have to wait until it arrives. I`m a beginner in ROS and I would like to know if is possible to use RTABMap with laser and Kinect without a robot. If yes, which static transform do I have to set to get the laser and Kinect working in a fake 2d robot (wood structure with wheels)? thak you
====EDIT======
Today latter, after digging and read some posts I could finaly get some good results.
First, I edit my lanch file and add some static transforms.
and then launch on my terminal
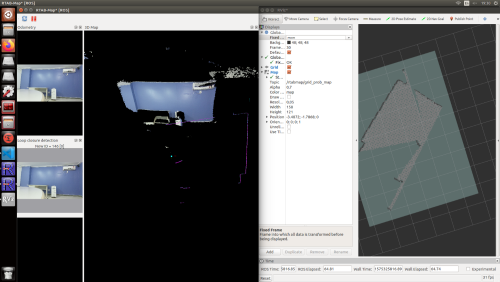
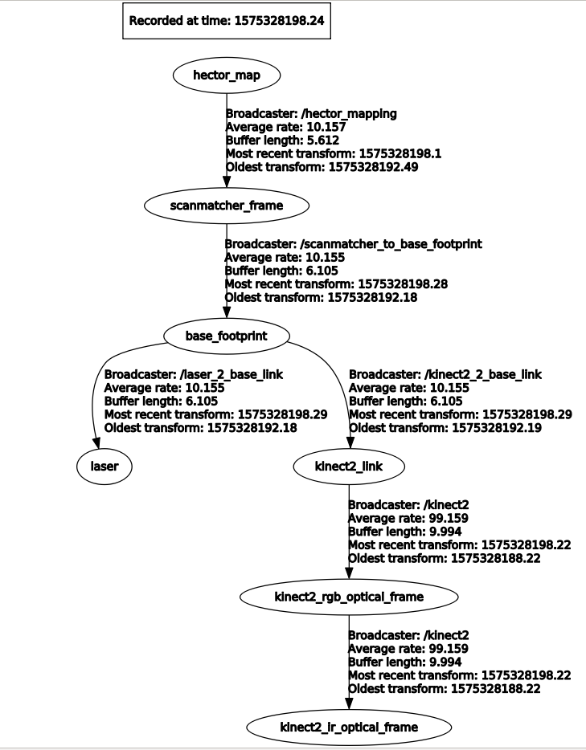
Now I abble to see the mapping mode and the clouds, the tf tree, and the rqt as following
 However, when I`m in the mapping process, my 3d point cloud somehow looks to be disorganized as presented in the image below.
However, when I`m in the mapping process, my 3d point cloud somehow looks to be disorganized as presented in the image below.
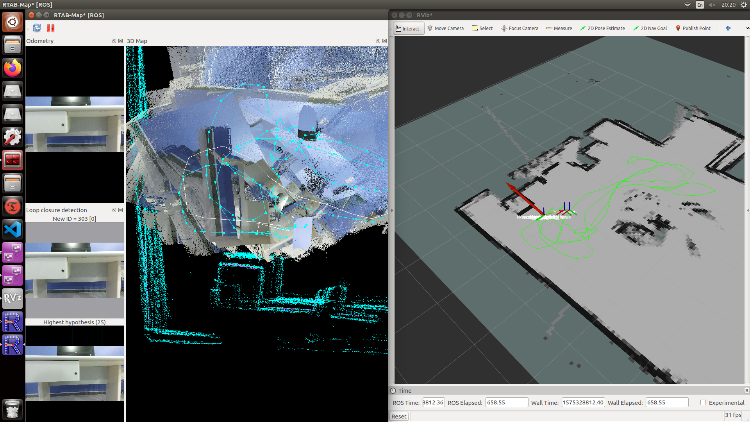
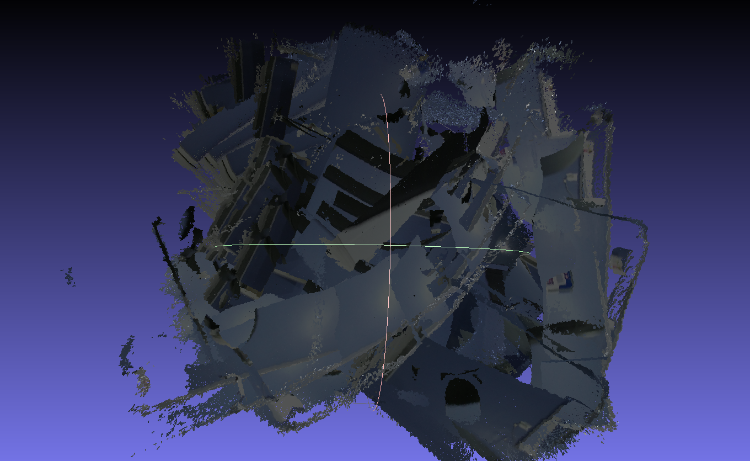 Do you have any suggestions about how to get the cloud organized as it keeps in handheld mapping?
Thank you
Do you have any suggestions about how to get the cloud organized as it keeps in handheld mapping?
Thank you
URL: http://official-rtab-map-forum.206.s1.nabble.com/mapping-with-kinect-v2-laser-scan-tp6367p6398.html
Hi Mathieu, I was not precise when I said that that I trying to do a handheld mapping with Laser+Kinect. In my lab we bough a 2d robot however we have to wait until it arrives. I`m a beginner in ROS and I would like to know if is possible to use RTABMap with laser and Kinect without a robot. If yes, which static transform do I have to set to get the laser and Kinect working in a fake 2d robot (wood structure with wheels)? thak you
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 | <launch> <!-- Choose visualization --> <arg name="rviz" default="false" /> <arg name="rtabmapviz" default="true" /> <!-- Choose hector_slam or icp_odometry for odometry --> <arg name="hector" default="true" /> <param name="use_sim_time" type="bool" value="false"/> <node if="$(arg hector)" pkg="tf" type="static_transform_publisher" name="scanmatcher_to_base_footprint" args="0.0 0.0 0.0 0.0 0.0 0.0 /scanmatcher_frame /base_footprint 100" /> <node pkg="tf" type="static_transform_publisher" name="laser_2_base_link" args="0.0 0.0 0.0 0.0 0.0 0.0 /base_footprint /laser 100" /> <node pkg="tf" type="static_transform_publisher" name="kinect2_2_base_link" args="0.0 0.0 0.0 0.0 0.0 0.0 /base_footprint /kinect2_link 100" /> <!-- Odometry from laser scans --> <!-- If argument "hector" is true, we use Hector mapping to generate odometry for us --> <node if="$(arg hector)" pkg="hector_mapping" type="hector_mapping" name="hector_mapping" output="screen"> <!-- Frame names --> <param name="map_frame" value="hector_map" /> <param name="base_frame" value="base_footprint" /> <param name="odom_frame" value="odom" /> <!-- Tf use --> <param name="pub_map_odom_transform" value="false"/> <param name="pub_map_scanmatch_transform" value="true"/> <param name="pub_odometry" value="true"/> <!-- Map size / start point --> <param name="map_resolution" value="0.025"/> <param name="map_size" value="2048"/> <param name="map_multi_res_levels" value="2" /> <!-- Map update parameters --> <param name="map_update_angle_thresh" value="0.06" /> <!-- Advertising config --> <param name="scan_topic" value="/scan"/> </node> <!-- If argument "hector" is false, we use rtabmap's icp odometry to generate odometry for us --> <node unless="$(arg hector)" pkg="rtabmap_ros" type="icp_odometry" name="icp_odometry" output="screen" > <remap from="scan" to="/scan"/> <remap from="odom" to="/scanmatch_odom"/> <remap from="odom_info" to="/rtabmap/odom_info"/> <param name="frame_id" type="string" value="base_footprint"/> <param name="Icp/PointToPlane" type="string" value="true"/> <param name="Icp/VoxelSize" type="string" value="0.05"/> <param name="Icp/Epsilon" type="string" value="0.001"/> <param name="Icp/PointToPlaneK" type="string" value="5"/> <param name="Icp/PointToPlaneRadius" type="string" value="0.3"/> <param name="Icp/MaxCorrespondenceDistance" type="string" value="0.1"/> <param name="Icp/PM" type="string" value="true"/> <!-- use libpointmatcher to handle PointToPlane with 2d scans--> <param name="Icp/PMOutlierRatio" type="string" value="0.95"/> <param name="Odom/Strategy" type="string" value="0"/> <param name="Odom/GuessMotion" type="string" value="true"/> <param name="Odom/ResetCountdown" type="string" value="0"/> <param name="Odom/ScanKeyFrameThr" type="string" value="0.9"/> </node> <group ns="rtabmap"> <node pkg="nodelet" type="nodelet" name="rgbd_sync" args="standalone rtabmap_ros/rgbd_sync" output="screen"> <remap from="rgb/image" to="/kinect2/hd/image_color_rect"/> <remap from="depth/image" to="/kinect2/hd/image_depth_rect"/> <remap from="rgb/camera_info" to="/kinect2/hd/camera_info"/> <!-- <param name="rgb/image_transport" type="string" value="compressed"/> <param name="depth/image_transport" type="string" value="compressedDepth"/> --> </node> <!-- SLAM --> <!-- args: "delete_db_on_start" and "udebug" --> <node name="rtabmap" pkg="rtabmap_ros" type="rtabmap" output="screen" args="--delete_db_on_start"> <param name="frame_id" type="string" value="base_footprint"/> <param name="subscribe_depth" type="bool" value="false"/> <param name="subscribe_rgbd" type="bool" value="true"/> <param name="subscribe_scan" type="bool" value="true"/> <remap from="scan" to="/scan"/> <!-- As hector doesn't provide compatible covariance in the odometry topic, don't use the topic and fix the covariance --> <param if="$(arg hector)" name="odom_frame_id" type="string" value="hector_map"/> <param if="$(arg hector)" name="odom_tf_linear_variance" type="double" value="0.0005"/> <param if="$(arg hector)" name="odom_tf_angular_variance" type="double" value="0.0005"/> <remap unless="$(arg hector)" from="odom" to="/scanmatch_odom"/> <param unless="$(arg hector)" name="subscribe_odom_info" type="bool" value="true"/> <!-- RTAB-Map's parameters --> <param name="Reg/Strategy" type="string" value="0"/> <!-- 0=Visual, 1=ICP, 2=Visual+ICP --> <param name="Reg/Force3DoF" type="string" value="true"/> <param name="RGBD/ProximityBySpace" type="string" value="false"/> </node> <!-- Visualisation RTAB-Map --> <node if="$(arg rtabmapviz)" pkg="rtabmap_ros" type="rtabmapviz" name="rtabmapviz" args="-d $(find rtabmap_ros)/launch/config/rgbd_gui.ini" output="screen"> <param name="subscribe_rgbd" type="bool" value="true"/> <param name="subscribe_laserScan" type="bool" value="true"/> <param name="frame_id" type="string" value="base_footprint"/> <remap from="scan" to="/scan"/> <!-- As hector doesn't provide compatible covariance in the odometry topic --> <param if="$(arg hector)" name="odom_frame_id" type="string" value="hector_map"/> <remap unless="$(arg hector)" from="odom" to="/scanmatch_odom"/> <param unless="$(arg hector)" name="subscribe_odom_info" type="bool" value="true"/> </node> </group> <!-- Visualisation RVIZ --> <node if="$(arg rviz)" pkg="rviz" type="rviz" name="rviz" args="-d $(find rtabmap_ros)/launch/config/demo_robot_mapping.rviz" output="screen"/> <node pkg="nodelet" type="nodelet" name="points_xyzrgb" args="standalone rtabmap_ros/point_cloud_xyzrgb"> <remap from="rgbd_image" to="/rtabmap/rgbd_image"/> <remap from="cloud" to="voxel_cloud" /> <param name="voxel_size" type="double" value="0.01"/> </node> </launch> |
$ roscore $ roslaunch urg_node urg_lidar.launch $ roslaunch kinect2_bridge kinect2_bridge.launch publish_tf:=true $ roslaunch my_rtabmap demo_rtabmap.launch
| Free forum by Nabble | Edit this page |