Comparison between realsense D435 vs T265 vs T265+D435 dual setup
Posted by matlabbe on
URL: http://official-rtab-map-forum.206.s1.nabble.com/Comparison-between-realsense-D435-vs-T265-vs-T265-D435-dual-setup-tp6456.html
Hi all,
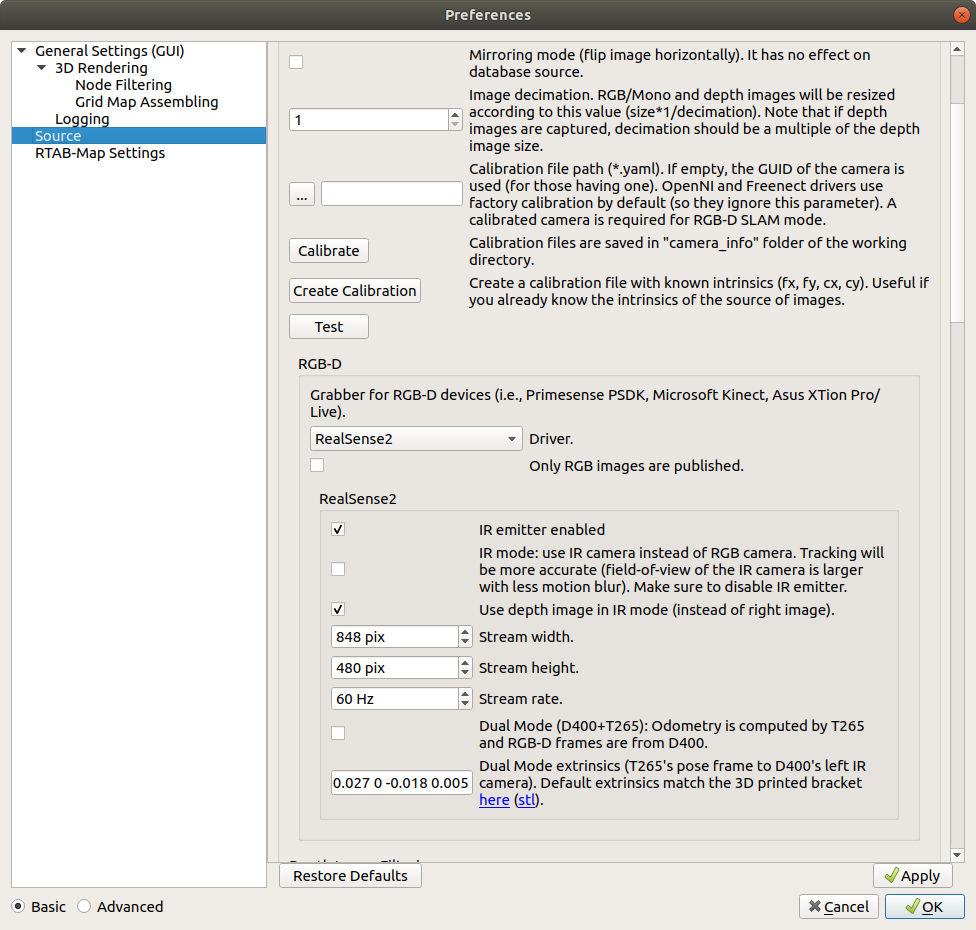
Here is a post about some experiments I did last october when I integrated a dual mode for T265 and D435 in rtabmap standalone (tested with this 3d printed mount).
I wanted to put the results somewhere to be found more easily. We can compare CPU usage between each setup, and also 3D map quality.
D435i (F2M odometry, Stereo-IR mode for larger field-of-view and less motion blur):
https://www.youtube.com/watch?v=8KHbiPttRlI
T265 (F2M odometry + fisheye 3D reconstruction, images are rectified at 30 Hz for odometry):
https://www.youtube.com/watch?v=Tm8nttMR7SQ
T265 (VIO odometry + fisheye 3D reconstruction, images are rectified only at 1 hz for 3d map):
https://www.youtube.com/watch?v=FwmNHHoDvvI
T265+D435 (VIO odometry from T265 and Ir/depth from D435):
https://www.youtube.com/watch?v=iHQOpPuVcys
The big advantage of the latest approach is the computation of odometry and disparity image are done on the cameras! This kind of setup could be easily integrated on a RPI4 for example.
cheers,
Mathieu
URL: http://official-rtab-map-forum.206.s1.nabble.com/Comparison-between-realsense-D435-vs-T265-vs-T265-D435-dual-setup-tp6456.html
Hi all,
Here is a post about some experiments I did last october when I integrated a dual mode for T265 and D435 in rtabmap standalone (tested with this 3d printed mount).
I wanted to put the results somewhere to be found more easily. We can compare CPU usage between each setup, and also 3D map quality.
D435i (F2M odometry, Stereo-IR mode for larger field-of-view and less motion blur):
https://www.youtube.com/watch?v=8KHbiPttRlI
T265 (F2M odometry + fisheye 3D reconstruction, images are rectified at 30 Hz for odometry):
https://www.youtube.com/watch?v=Tm8nttMR7SQ
T265 (VIO odometry + fisheye 3D reconstruction, images are rectified only at 1 hz for 3d map):
https://www.youtube.com/watch?v=FwmNHHoDvvI
T265+D435 (VIO odometry from T265 and Ir/depth from D435):
https://www.youtube.com/watch?v=iHQOpPuVcys
The big advantage of the latest approach is the computation of odometry and disparity image are done on the cameras! This kind of setup could be easily integrated on a RPI4 for example.
cheers,
Mathieu
| Free forum by Nabble | Edit this page |