RTAB-Map Viz does not display anything
Posted by g.bartoli on
URL: http://official-rtab-map-forum.206.s1.nabble.com/RTAB-Map-Viz-does-not-display-anything-tp651.html
Hi Mathieu,
I followed your tutorial to bring up RTAB-Map with ASUS Xtion + Odometry (laser scan disabled) and I prepared the following launch file for my experiments:
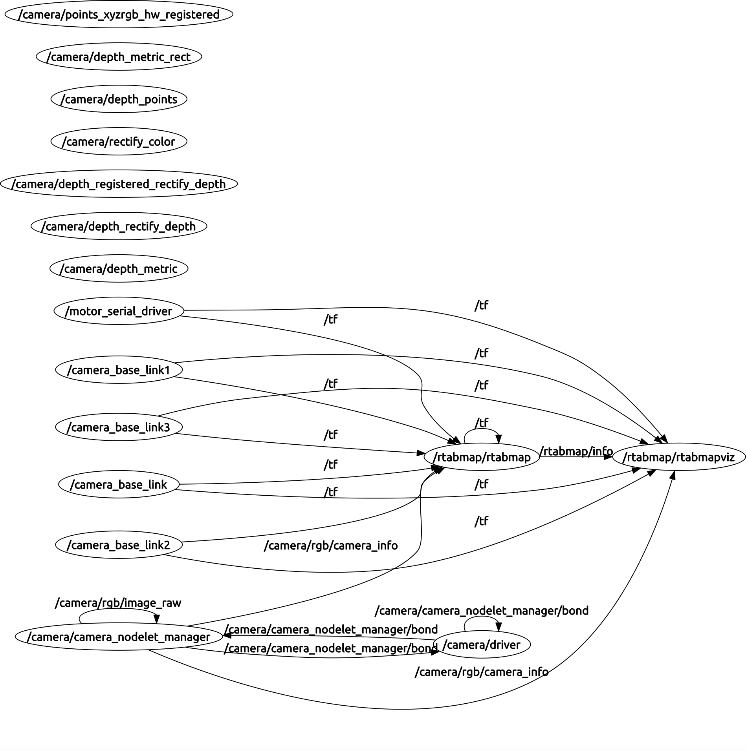
And these are the node connections:
Do you have an idea of what am I doing wrong?
Thanks in advance!
PS: launching "rtabmap" standalone works perfectly, I tested it for over two weeks, now I just want to integrate it at least with real odometry from motors.
URL: http://official-rtab-map-forum.206.s1.nabble.com/RTAB-Map-Viz-does-not-display-anything-tp651.html
Hi Mathieu,
I followed your tutorial to bring up RTAB-Map with ASUS Xtion + Odometry (laser scan disabled) and I prepared the following launch file for my experiments:
<launch>
<!-- Low-level motor interface (provides wheel odometry and tf) -->
<node pkg="motor_serial_driver" type="motor_serial_driver" name="motor_serial_driver" output="screen" required="true" args="/dev/ttyS0 115200"/>
<!-- ASUS Xtion Pro driver node -->
<include file="$(find openni2_launch)/launch/openni2.launch">
<arg name="depth_registration" value="true"/>
</include>
<!-- Visualization mode -->
<arg name="rviz" default="false" />
<arg name="rtabmapviz" default="true" />
<!-- RTAB-Map -->
<group ns="rtabmap">
<node name="rtabmap" pkg="rtabmap_ros" type="rtabmap" output="screen" args="--delete_db_on_start">
<!-- Fixed frame on the robot -->
<param name="frame_id" type="string" value="base_link"/>
<remap from="odom" to="/base_controller/odom"/>
<!-- Depth information from sensors -->
<param name="subscribe_depth" type="bool" value="true"/>
<remap from="rgb/image" to="/camera/rgb/image_rect_color"/>
<remap from="depth/image" to="/camera/depth_registered/image_raw"/>
<remap from="rgb/camera_info" to="/camera/rgb/camera_info"/>
<!--<param name="subscribe_laserScan" type="bool" value="true"/>-->
</node>
<!-- Visualisation RTAB-Map -->
<node if="$(arg rtabmapviz)" pkg="rtabmap_ros" type="rtabmapviz" name="rtabmapviz" args="-d $(find rtabmap_ros)/launch/config/rgbd_gui.ini" output="screen">
<param name="subscribe_depth" type="bool" value="true"/>
<!--<param name="subscribe_laserScan" type="bool" value="true"/>-->
<param name="frame_id" type="string" value="base_link"/>
<param name="wait_for_transform" type="bool" value="true"/>
<remap from="rgb/image" to="/camera/rgb/image_rect_color"/>
<remap from="depth/image" to="/camera/depth_registered/image_raw"/>
<remap from="rgb/camera_info" to="/camera/rgb/camera_info"/>
<remap from="odom" to="/base_controller/odom"/>
<param name="rgb/image_transport" type="string" value="compressed"/>
<param name="depth/image_transport" type="string" value="compressedDepth"/>
</node>
</group>
</launch>
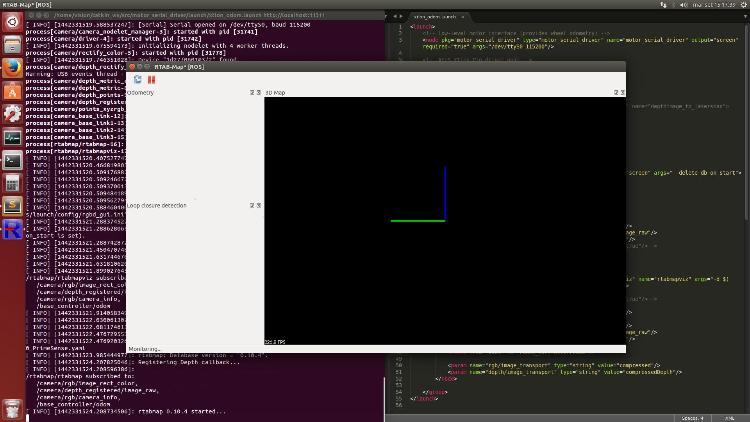
The first node provides the interface to the motors and computes the odometry, while the second starts the Xtion sensor. The rtabmap and rtabmapviz nodes are configured according to your tutorials. When I launch this file the output, it seems everything starts correctly, since after all the initialization messages I receive the message "rtabmap 0.10.4 started..." and rtabmapviz shows up on the monitor, but it does not display either the 3D map or the graph, this is a screenshot:
And these are the node connections:
Do you have an idea of what am I doing wrong?
Thanks in advance!
PS: launching "rtabmap" standalone works perfectly, I tested it for over two weeks, now I just want to integrate it at least with real odometry from motors.
~Guido
| Free forum by Nabble | Edit this page |