Re: rtabmap_ros outdoor 3D mapping
Posted by matlabbe on
URL: http://official-rtab-map-forum.206.s1.nabble.com/rtabmap-ros-outdoor-3D-mapping-tp6104p6529.html
Hi,
Not sure I have the right database, but beware that when the drone/camera is on the ground, the depth values on the ground seem wrong:
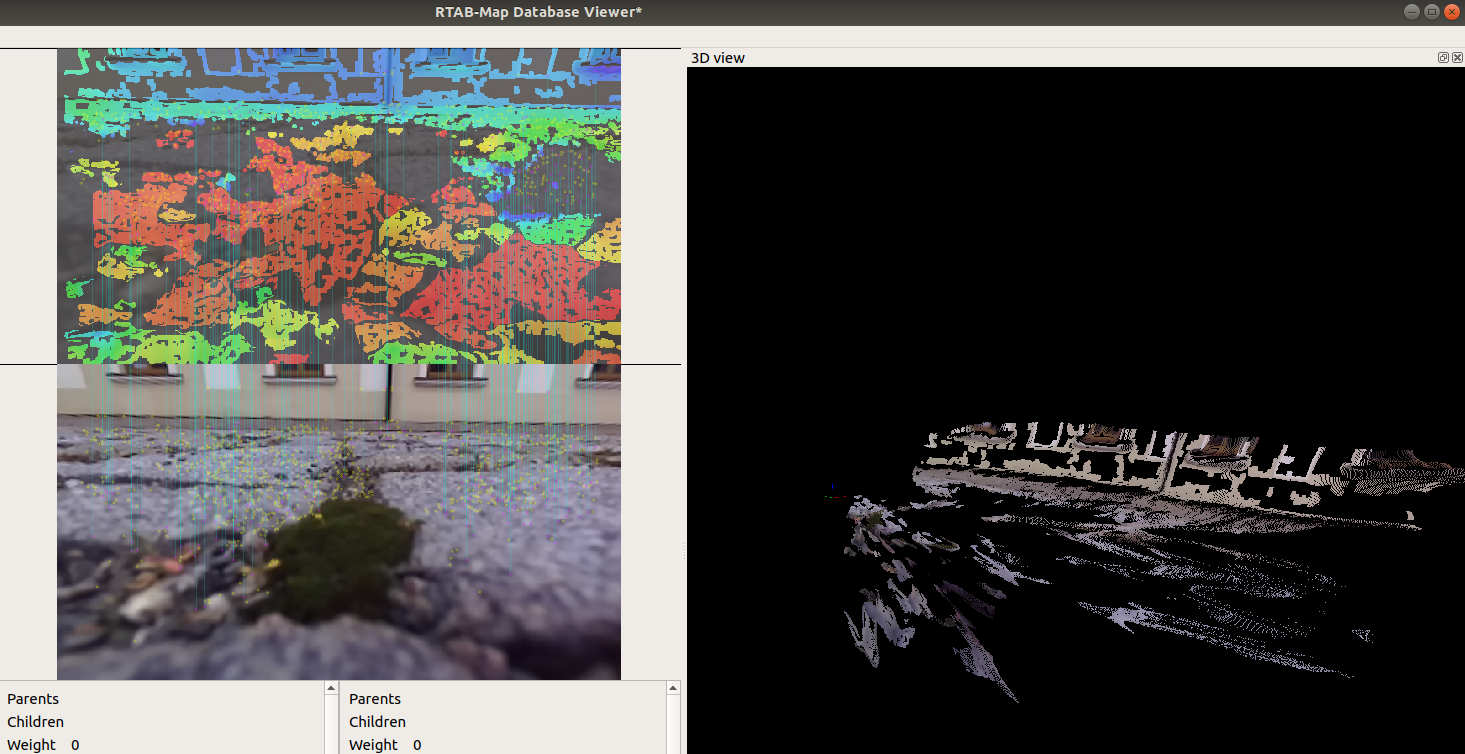
Using Optimizer/GravitySigma=0.3 seems to add more errors than remove them. I think it is because the TF between mavros IMU and the camera is wrong, or not enough accurate. With Optimizer/GravitySigma=0 (gravity optimization disabled), the map look a lot better but not aligned to gravity.
Please copy/paste the launch file between "raw" xml tags instead of an image, I won't re-write manually to test the bag.
cheers,
Mathieu
URL: http://official-rtab-map-forum.206.s1.nabble.com/rtabmap-ros-outdoor-3D-mapping-tp6104p6529.html
Hi,
Not sure I have the right database, but beware that when the drone/camera is on the ground, the depth values on the ground seem wrong:
Using Optimizer/GravitySigma=0.3 seems to add more errors than remove them. I think it is because the TF between mavros IMU and the camera is wrong, or not enough accurate. With Optimizer/GravitySigma=0 (gravity optimization disabled), the map look a lot better but not aligned to gravity.
Please copy/paste the launch file between "raw" xml tags instead of an image, I won't re-write manually to test the bag.
cheers,
Mathieu
| Free forum by Nabble | Edit this page |