Re: rtabmap_ros outdoor 3D mapping
Posted by acp on
URL: http://official-rtab-map-forum.206.s1.nabble.com/rtabmap-ros-outdoor-3D-mapping-tp6104p6539.html
Hi Mathieu
I have calibrated the imu and the zed camera
Here you have a .bag and .db files made with the new calibration and the rtabmap.launch posted previously.
http://www.fit.vutbr.cz/~plascencia/Yard.db
http://www.fit.vutbr.cz/~plascencia/Half.bag
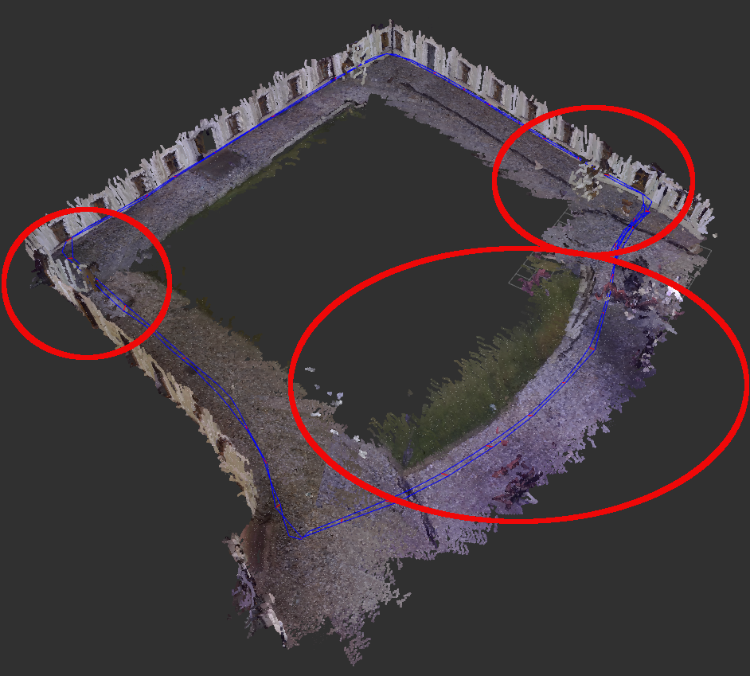
Well. within the circles it can be seen the problems. For instance:
- multiple wall
-the path get twisted even with loop closure
-points are detected under ground at the initial position
- The tree is detected multiple times

I have a question, is it possible to change parameters and run the rtabmap.launch again with the recorded rtabmap.db to see if the new value of the parameter help or not.
If it is possible, how can I do it?
Any help it is appreciate it.
Hi Mathieu,
I just recorded a rosbag that can run the rtabmap.lauch script that has been posted previously.
http://www.fit.vutbr.cz/~plascencia/YardBag.bag
I just disabled the following tags:
<arg name="odom_tf_angular_variance" value="0.01"/>
<arg name="odom_tf_linear_variance" value="0.0004"/>
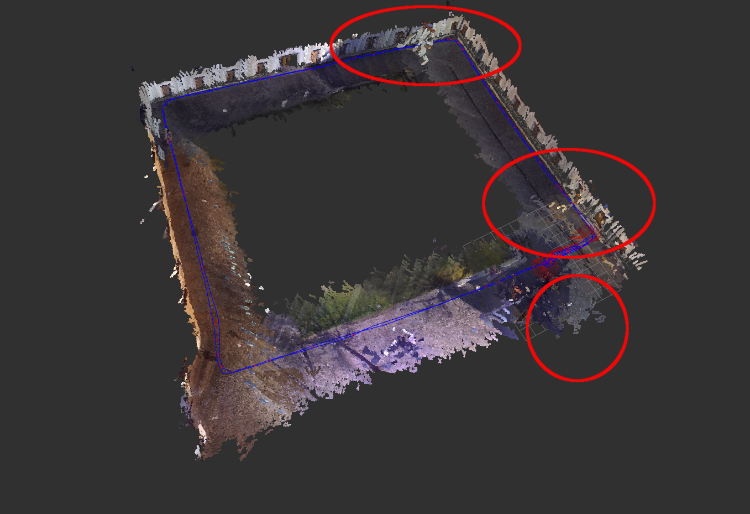
And the twisted map disappeared, but I still have the problem of the wall goes out when the drone is turning and the points detected under ground, even I have the following parameter.
<(param) name =" Grid/MaxGroundHeight" type="double" value="0.05"/>
As you can see it in the picture.
Thank you :)
URL: http://official-rtab-map-forum.206.s1.nabble.com/rtabmap-ros-outdoor-3D-mapping-tp6104p6539.html
Hi Mathieu
I have calibrated the imu and the zed camera
Here you have a .bag and .db files made with the new calibration and the rtabmap.launch posted previously.
http://www.fit.vutbr.cz/~plascencia/Yard.db
http://www.fit.vutbr.cz/~plascencia/Half.bag
Well. within the circles it can be seen the problems. For instance:
- multiple wall
-the path get twisted even with loop closure
-points are detected under ground at the initial position
- The tree is detected multiple times
I have a question, is it possible to change parameters and run the rtabmap.launch again with the recorded rtabmap.db to see if the new value of the parameter help or not.
If it is possible, how can I do it?
Any help it is appreciate it.
Hi Mathieu,
I just recorded a rosbag that can run the rtabmap.lauch script that has been posted previously.
http://www.fit.vutbr.cz/~plascencia/YardBag.bag
I just disabled the following tags:
<arg name="odom_tf_angular_variance" value="0.01"/>
<arg name="odom_tf_linear_variance" value="0.0004"/>
And the twisted map disappeared, but I still have the problem of the wall goes out when the drone is turning and the points detected under ground, even I have the following parameter.
<(param) name =" Grid/MaxGroundHeight" type="double" value="0.05"/>
As you can see it in the picture.
Thank you :)
| Free forum by Nabble | Edit this page |