RTAB-Map with D435i on a UR10
Posted by robertzickler on
URL: http://official-rtab-map-forum.206.s1.nabble.com/RTAB-Map-with-D435i-on-a-UR10-tp6568.html
Hello everyone,
I'm trying to create a map with the Intel Realsense D435i mounted on the end effector of an UR10 6 DOF manipulator. The idea is to use the movement of the manipulator to get the position and orientation of the depth camera in the environment. I use RVIZ with MoveIt! Therefore, I want to use the map in RVIZ, too. As well as having it aligned correctly.
I tried a lot of things but can't get it working. Here are my questions:
1) The base_link of the manipulator is always fixed to the world. How do I have to link map and Odom? Do I have to create them in the UR10-Xacro/URDF and then link them to the rtabmap or is this done within rtabmap?
2) How do I correctly link the end effector with the camera? With a “static_transform_publisher” like
3) I neither want to use the IMU nor the visual odometry but the TF frame of the end effector as Odom. Is this possible?
4) Somehow it should be possible to give a ground truth with “ground_truth_frame_id”. In my case this would be the “world” but is this necessary if I have the full “perfect” tf from the world to the camera?
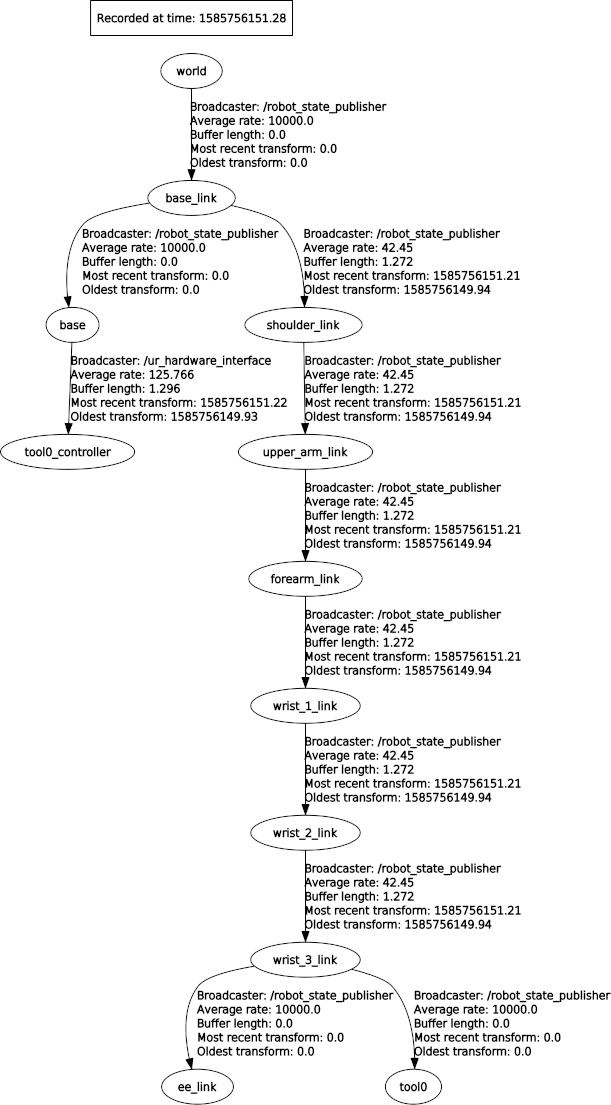
Here is the tf-tree of the UR10 without the camera:
Thank you!
Robert
URL: http://official-rtab-map-forum.206.s1.nabble.com/RTAB-Map-with-D435i-on-a-UR10-tp6568.html
Hello everyone,
I'm trying to create a map with the Intel Realsense D435i mounted on the end effector of an UR10 6 DOF manipulator. The idea is to use the movement of the manipulator to get the position and orientation of the depth camera in the environment. I use RVIZ with MoveIt! Therefore, I want to use the map in RVIZ, too. As well as having it aligned correctly.
I tried a lot of things but can't get it working. Here are my questions:
1) The base_link of the manipulator is always fixed to the world. How do I have to link map and Odom? Do I have to create them in the UR10-Xacro/URDF and then link them to the rtabmap or is this done within rtabmap?
2) How do I correctly link the end effector with the camera? With a “static_transform_publisher” like
<node pkg="tf" type="static_transform_publisher" name="eef_to_camera_tf" args="x y z r p y /ee_link /camera_link 10" />
4) Somehow it should be possible to give a ground truth with “ground_truth_frame_id”. In my case this would be the “world” but is this necessary if I have the full “perfect” tf from the world to the camera?
Here is the tf-tree of the UR10 without the camera:
Thank you!
Robert
| Free forum by Nabble | Edit this page |