Re: rtabmap_ros on Odroid XU4 2020
Posted by elgarbe on
URL: http://official-rtab-map-forum.206.s1.nabble.com/rtabmap-ros-on-Odroid-XU4-2020-tp6557p6590.html
Thank!
So I have this now (I'm using terminal miltiplexer)
robot:
Pane 1:
Pane 2:
On client PC I've run:
Pane 1:
and I get:
and
So it's seems to work ok.
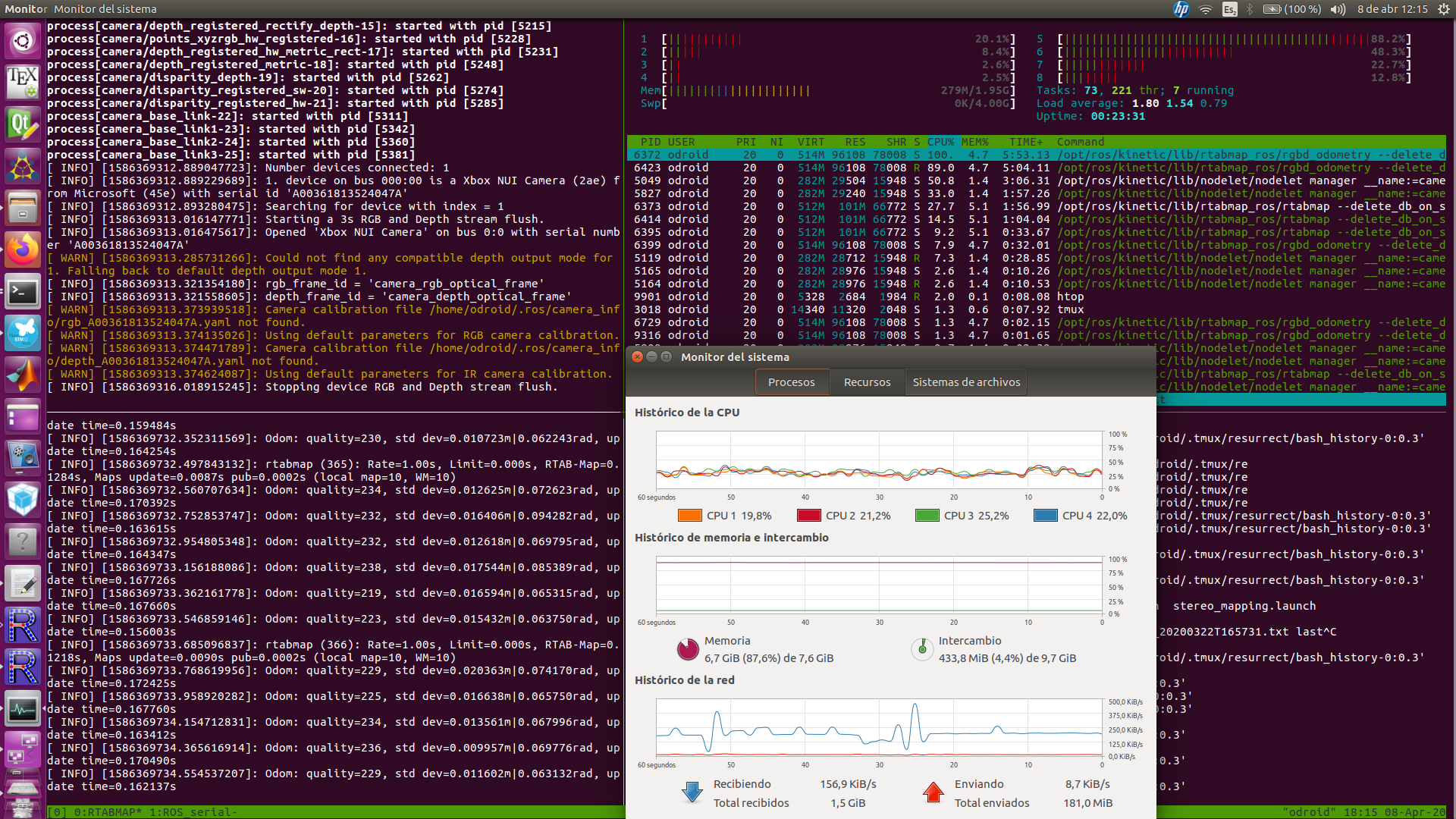
I wold like to improve a little the map. Based on Odroid utilization and network traffic, could you recommend some modification in order to get better 3d map?
Is there a way to get a 2d map from recorded database? or is it possible to get 2d map while in 3d mapping?
How much odometry from the robot could help to get a better map? I'm working on add odometry with robot_localization, but I can't get a good configuration right now, in particular for turns.
Thank!
URL: http://official-rtab-map-forum.206.s1.nabble.com/rtabmap-ros-on-Odroid-XU4-2020-tp6557p6590.html
Thank!
So I have this now (I'm using terminal miltiplexer)
robot:
Pane 1:
export ROS_IP=10.10.10.5 roslaunch freenect_launch freenect.launch depth_registration:=true data_skip:=2
Pane 2:
export ROS_IP=10.10.10.5 roslaunch rtabmap_ros rgbd_mapping.launch rtabmap_args:="--delete_db_on_start --Vis/MaxFeatures 500 --Mem/ImagePreDecimation 2 --Mem/ImagePostDecimation 2 --Kp/DetectorStrategy 6 --OdomF2M/MaxSize 1000 --Odom/ImageDecimation 2" rtabmapviz:=false
On client PC I've run:
Pane 1:
export ROS_IP=10.10.10.100 export ROS_MASTER_URI=http://10.10.10.5:11311 export ROS_NAMESPACE=rtabmap && rosrun rtabmap_ros rtabmapviz odom:=/odom
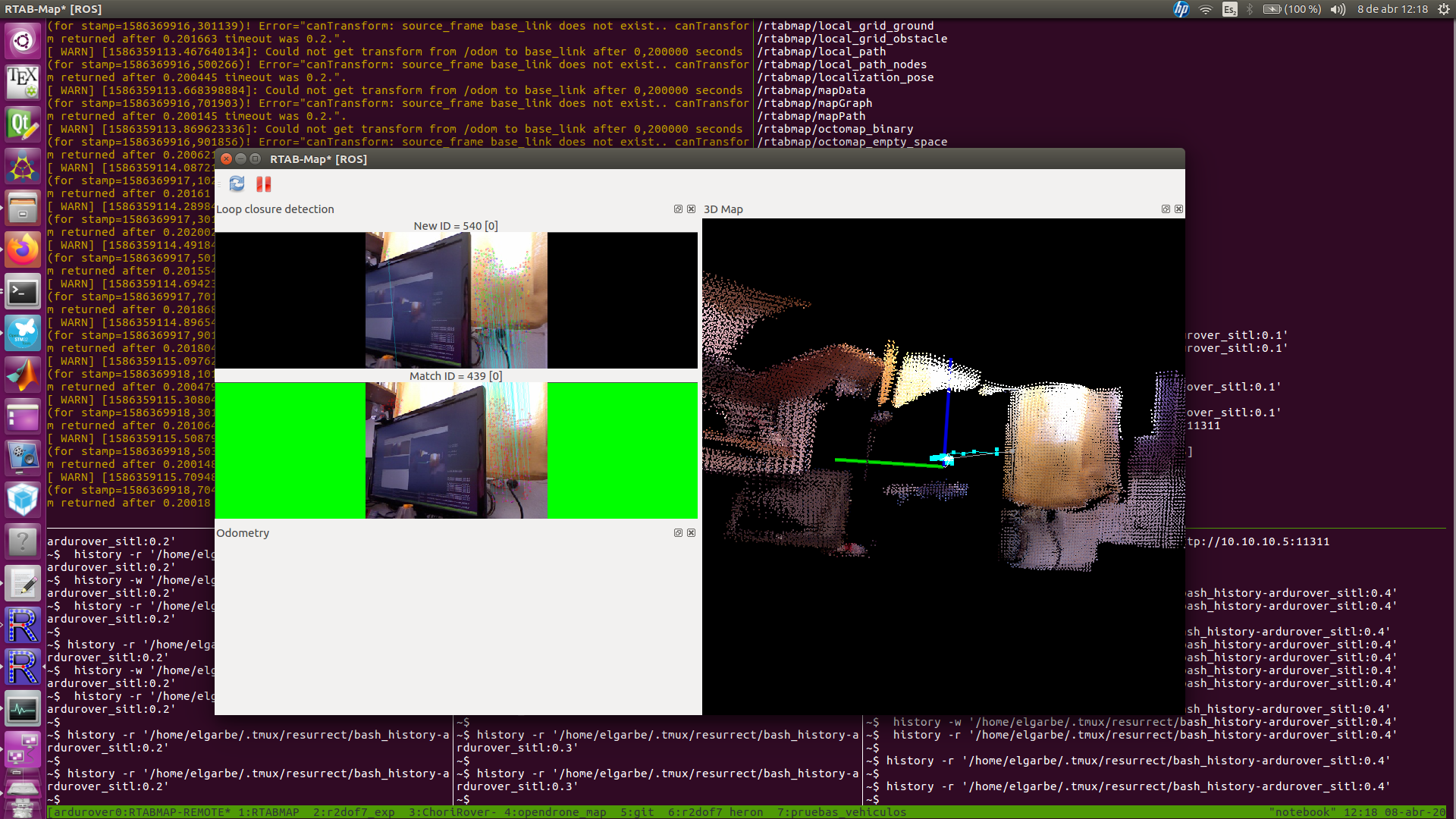
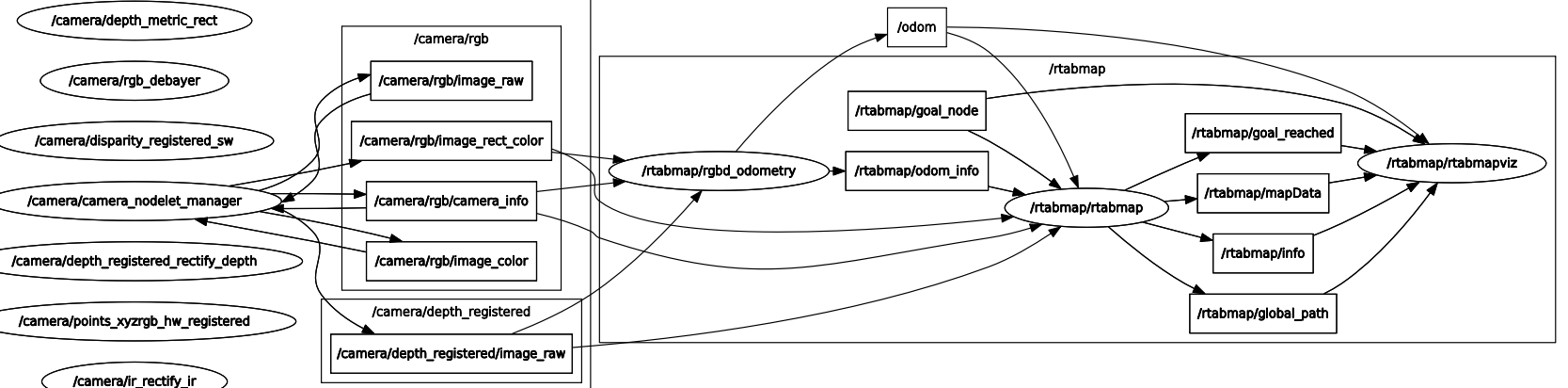
and I get:
and
So it's seems to work ok.
I wold like to improve a little the map. Based on Odroid utilization and network traffic, could you recommend some modification in order to get better 3d map?
Is there a way to get a 2d map from recorded database? or is it possible to get 2d map while in 3d mapping?
How much odometry from the robot could help to get a better map? I'm working on add odometry with robot_localization, but I can't get a good configuration right now, in particular for turns.
Thank!
| Free forum by Nabble | Edit this page |