Re: rtabmap does not find loop closures
Posted by acp on
URL: http://official-rtab-map-forum.206.s1.nabble.com/rtabmap-does-not-find-loop-closures-tp6586p6615.html
Hi Mathiu.
Thank you for your answer.
What do you mean when you say: If you set RGBD/OptimizeStrategy, it will still be recognized for backward compatibility (copied to Optimizer/Strategy under the hood). sorry for not understanding :)
It sounds good to rebuild rtabmap with GTSAM support, however I have been using the binaries rtabmap_ros, e,g, I have installed rtabmap_ros over $sudo apt-get install
well, so far I would like to keep the rtabmap_ros as it is:
When I run:
$rtabmap --version
RTAB-Map: 0.19.3
OpenCV: 3.3.1-dev
With TORO: true
With g2o: true
With GTSAM: false
With Vertigo: true
With ZED: false
So far I have been using:
$ rosparam get /zed/rtabmap/Optimizer/Strategy
'1'
$ rosparam get /zed/rtabmap/RGBD/OptimizeMaxError
'3.0'
$ rosparam get /zed/rtabmap/Optimizer/Robust
'false'
$ rosparam get /zed/rtabmap/Optimizer/GravitySigma
'0.3'
I have a question:
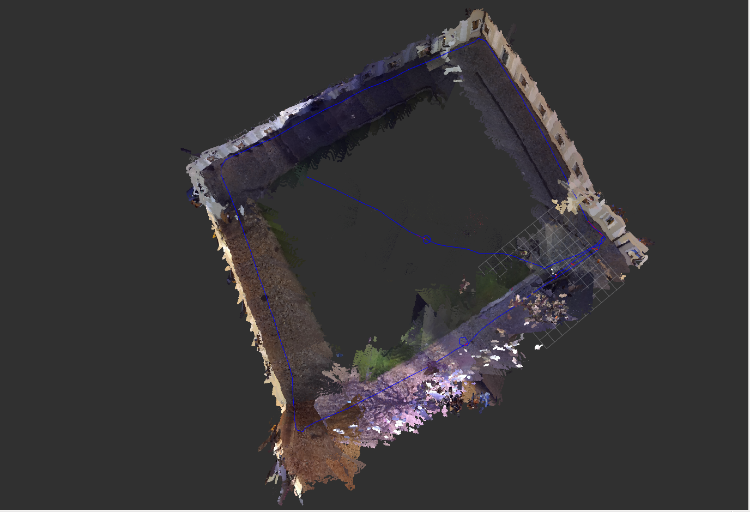
When I try to make a 3D outdoor map, sometimes I get a good map and sometimes I get the map you can see in the below pictures. The main problem is that when the odom catches or finds a odom-path, it gets deformed as you can see in the two pictures with red circles. Then the final 3D map is totally deformed.
Do you have a clue what can be wrong or do i need to set some parameter?


URL: http://official-rtab-map-forum.206.s1.nabble.com/rtabmap-does-not-find-loop-closures-tp6586p6615.html
Hi Mathiu.
Thank you for your answer.
What do you mean when you say: If you set RGBD/OptimizeStrategy, it will still be recognized for backward compatibility (copied to Optimizer/Strategy under the hood). sorry for not understanding :)
It sounds good to rebuild rtabmap with GTSAM support, however I have been using the binaries rtabmap_ros, e,g, I have installed rtabmap_ros over $sudo apt-get install
well, so far I would like to keep the rtabmap_ros as it is:
When I run:
$rtabmap --version
RTAB-Map: 0.19.3
OpenCV: 3.3.1-dev
With TORO: true
With g2o: true
With GTSAM: false
With Vertigo: true
With ZED: false
So far I have been using:
$ rosparam get /zed/rtabmap/Optimizer/Strategy
'1'
$ rosparam get /zed/rtabmap/RGBD/OptimizeMaxError
'3.0'
$ rosparam get /zed/rtabmap/Optimizer/Robust
'false'
$ rosparam get /zed/rtabmap/Optimizer/GravitySigma
'0.3'
I have a question:
When I try to make a 3D outdoor map, sometimes I get a good map and sometimes I get the map you can see in the below pictures. The main problem is that when the odom catches or finds a odom-path, it gets deformed as you can see in the two pictures with red circles. Then the final 3D map is totally deformed.
Do you have a clue what can be wrong or do i need to set some parameter?
| Free forum by Nabble | Edit this page |