Re: Using Kinect2 and LiDAR to Map and Navigate
Posted by jingyu on
URL: http://official-rtab-map-forum.206.s1.nabble.com/Using-Kinect2-and-LiDAR-to-Map-and-Navigate-tp6599p6616.html
Hi Matlabbe,
I want to add some updates of my recent progress. I used the obstacles_cloud and ground_cloud in the costmap and it works. But I still have some problems.
1. When the obstacles are small, the camera can recognize it at a considerably large distance, and it will soon turned to avoid the obstacles. But when the obstacles is outside the camera's range, the planned path will turn to the obstacle's position. At this time, even the camera heads the obstacle's direction, it cannot see the obstacles since they are closer. When I tilt the camera at a larger angle (20 degrees), its performance is better at avoiding obstacles but can only see very little visual information (the height of 3D map is low). I tried to set clearing of LiDAR to false but can still have the problem. The obstacles I want to avoid are common in underground parking lot.

2. Sometimes the RTABmap will plan a path that is not reasonable (the green path is the RTABMap global path). Why this happens and how can I fix it?
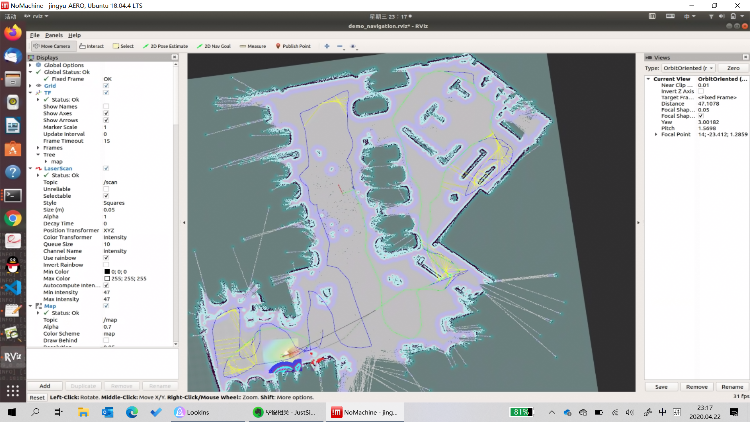
URL: http://official-rtab-map-forum.206.s1.nabble.com/Using-Kinect2-and-LiDAR-to-Map-and-Navigate-tp6599p6616.html
Hi Matlabbe,
I want to add some updates of my recent progress. I used the obstacles_cloud and ground_cloud in the costmap and it works. But I still have some problems.
1. When the obstacles are small, the camera can recognize it at a considerably large distance, and it will soon turned to avoid the obstacles. But when the obstacles is outside the camera's range, the planned path will turn to the obstacle's position. At this time, even the camera heads the obstacle's direction, it cannot see the obstacles since they are closer. When I tilt the camera at a larger angle (20 degrees), its performance is better at avoiding obstacles but can only see very little visual information (the height of 3D map is low). I tried to set clearing of LiDAR to false but can still have the problem. The obstacles I want to avoid are common in underground parking lot.
2. Sometimes the RTABmap will plan a path that is not reasonable (the green path is the RTABMap global path). Why this happens and how can I fix it?
| Free forum by Nabble | Edit this page |