Re: Autonomous Navigation
Posted by willzoe on
URL: http://official-rtab-map-forum.206.s1.nabble.com/Autonomous-Navigation-tp801p6625.html
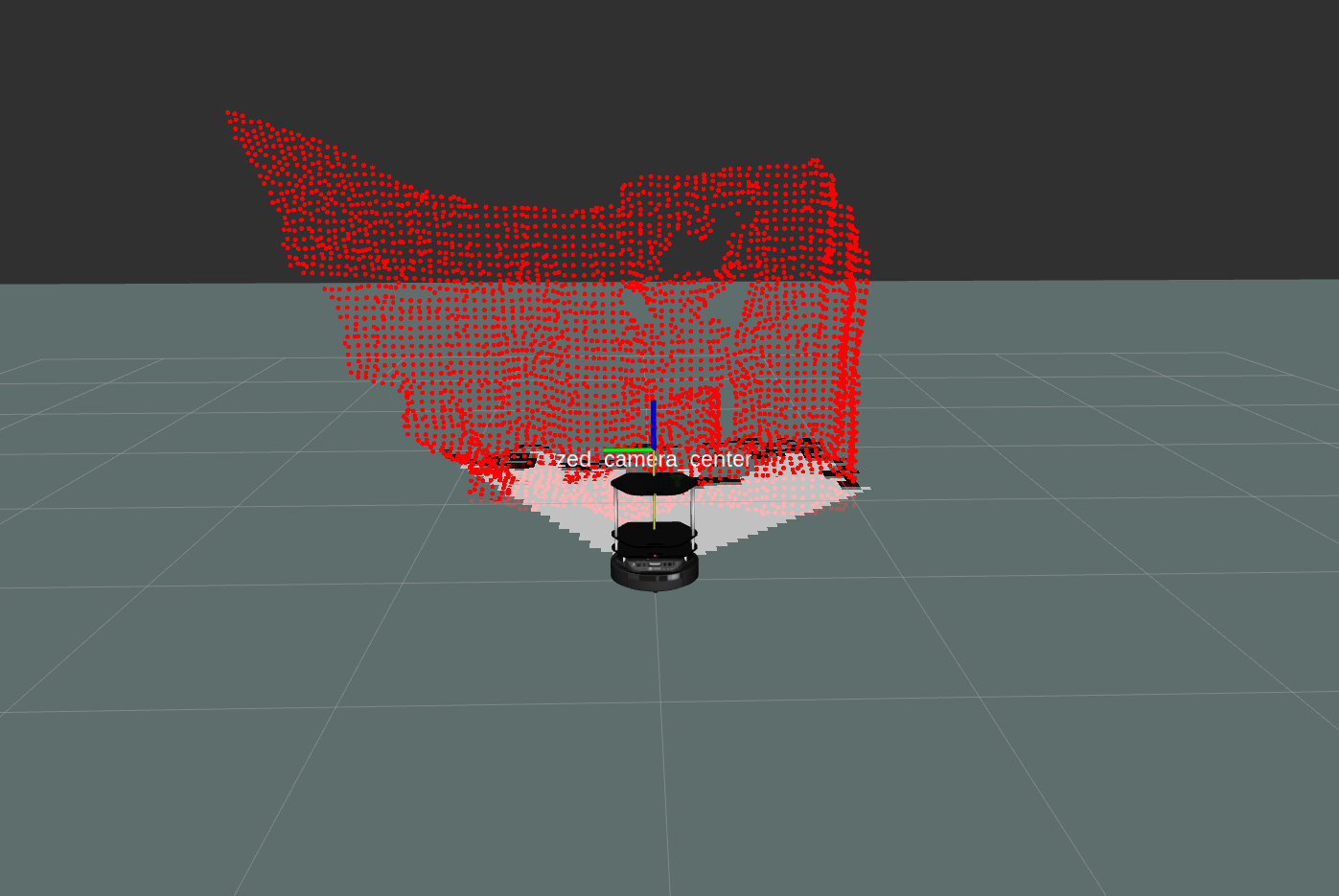
1) According to the above example, through nodelet rtabmap_ros/point_cloud_xyz, I can convert the depth image into a point cloud. Results as shown below:
But when using nodelet rtabmap_ros/obstacles_detection, I encountered some problems:
When launching the nodelet, the nodelet manager reports the following two errors:
When I subscribe to the topic /planner_cloud in rviz, the nodelet manager keeps reporting the following errors:
Is it because the parameters are not set correctly?
2)I found that rtabmap released several point cloud maps, namely /rtabmap/cloud_map, /rtabmap/cloud_ground and /rtabmap/cloud_obstacles. I subscribed to them in rviz, and found that when subscribing to /rtabmap/cloud_ground, there was no display; when subscribing to /rtabmap/cloud_obstacles, the point clouds of walls and other objects were projected onto the ground, as shown in the following figure:
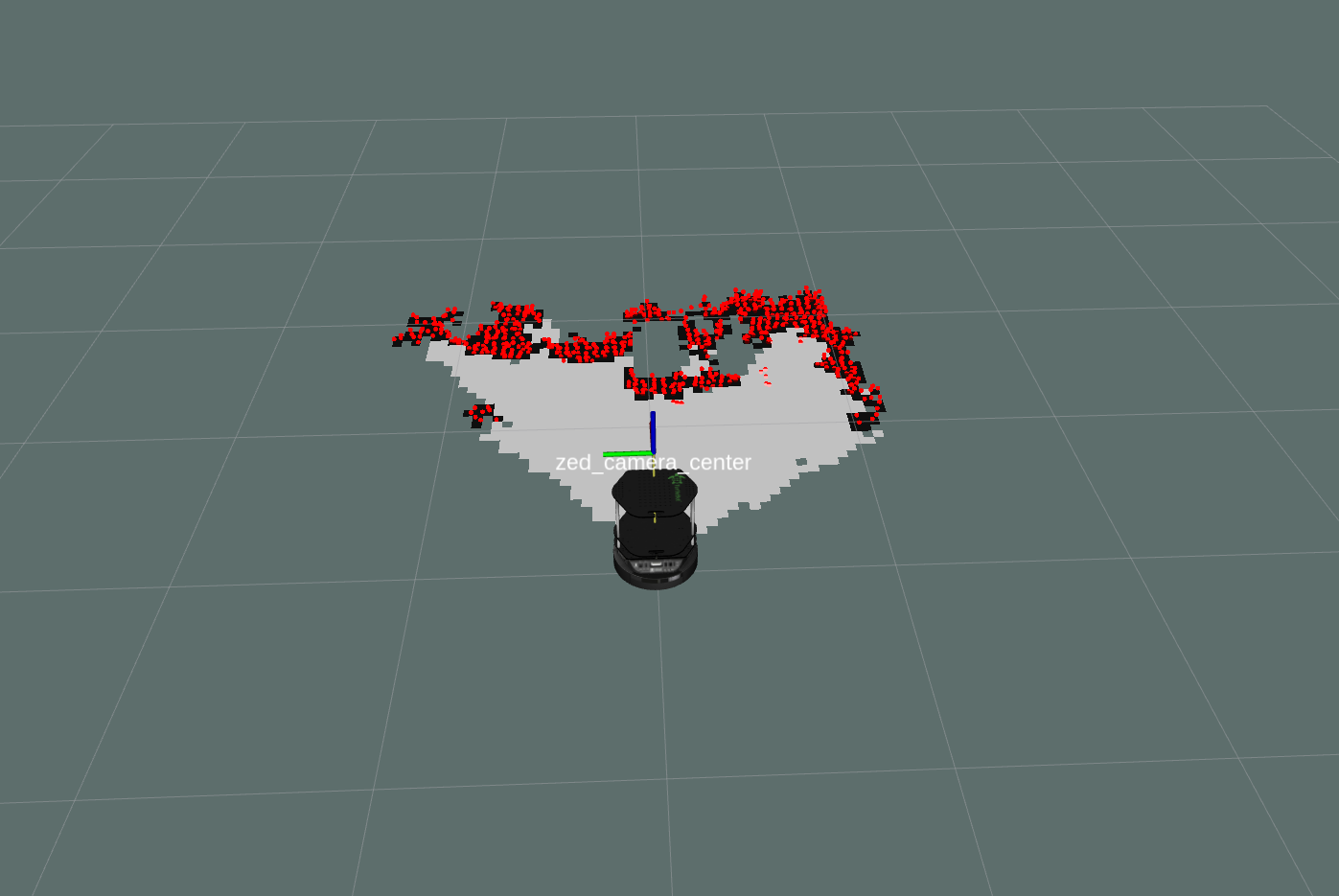
Can this topic be used as PointCloud2 type observation_sources?
URL: http://official-rtab-map-forum.206.s1.nabble.com/Autonomous-Navigation-tp801p6625.html
1) According to the above example, through nodelet rtabmap_ros/point_cloud_xyz, I can convert the depth image into a point cloud. Results as shown below:
But when using nodelet rtabmap_ros/obstacles_detection, I encountered some problems:
When launching the nodelet, the nodelet manager reports the following two errors:
[ERROR] [1588255591.812918618]: obstacles_detection: Parameter "min_cluster_size" has moved from rtabmap_ros to rtabmap library. Use parameter "Grid/MinClusterSize" instead. The value is still copied to new parameter name. [ERROR] [1588255591.826153797]: obstacles_detection: Parameter "max_obstacles_height" has moved from rtabmap_ros to rtabmap library. Use parameter "Grid/MaxObstacleHeight" instead. The value is still copied to new parameter name.
When I subscribe to the topic /planner_cloud in rviz, the nodelet manager keeps reporting the following errors:
[ERROR] [1588256201.869469533]: Lookup would require extrapolation into the future. Requested time 1588256201.817056506 but the latest data is at time 1588256201.650178506, when looking up transform from frame [base_footprint] to frame [map]
Is it because the parameters are not set correctly?
2)I found that rtabmap released several point cloud maps, namely /rtabmap/cloud_map, /rtabmap/cloud_ground and /rtabmap/cloud_obstacles. I subscribed to them in rviz, and found that when subscribing to /rtabmap/cloud_ground, there was no display; when subscribing to /rtabmap/cloud_obstacles, the point clouds of walls and other objects were projected onto the ground, as shown in the following figure:
Can this topic be used as PointCloud2 type observation_sources?
| Free forum by Nabble | Edit this page |